UART — Универсальный Асинхронный Приёмопередатчик
Универсальный асинхронный приёмопередатчик (Univsersal Asynchronos Reciever-Transmitter) — это физическое устройство приёма и передачи данных по двум проводам. Оно позволяет двум устройствам обмениваться данными на различных скоростях. В спецификацию UART не входят аналоговые уровни на которых ведётся общение между устройствами, UART это протокол передачи единиц и нулей, электрическую спецификацию на себя берут другие стандарты, такие как TTL (transistor-transistor logic — транзисторно-транзисторная логика), RS-232, RS-422, RS-485 и другие (RS [англ.recommended standard] — рекомендованный стандарт). На данный момент в микроконтроллерах используется в основном TTL (или точнее CMOS) UART для соединения не более двух устройств. В наших примерах мы часто называем его последовательным портом.
Подключение:
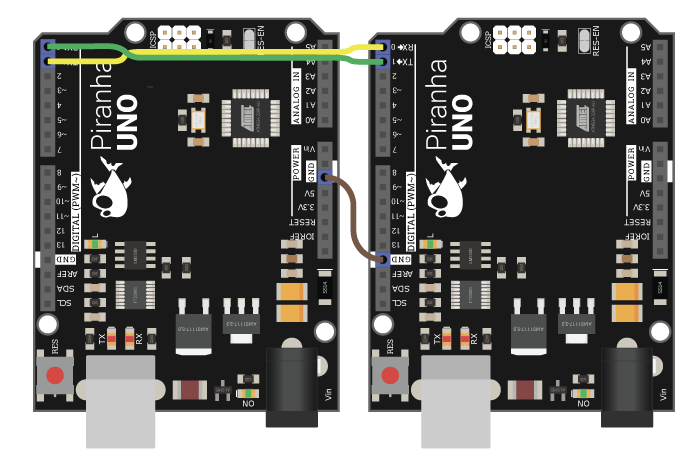
У каждого устройства, поддерживающего UART обычно обозначены два вывода: RX и TX. TX — означает transmit (передаю), RX — receive (принимаю). Отсюда становится понятно что RX одного устройства нужно подключать к TX другого. Если Вы подключите RX одного устройства к RX другого, то оба устройства будут слушать друг друга, вы соединили их входы. Если соединить TX и TX — это уже более опасно, это выходы низкого сопротивления устройств и если на одном будет логическая единица, а на втором ноль — по проводу пойдёт ток короткого замыкания (это зависит от конкретной программной или аппаратной реализации). Хотя в современных чипах от этого есть защита, на всякий случай, не стоит на неё ориентироваться. Так же необходимо объединить референсные уровни двух устройств (GND—GND), если не подразумевается гальваническая развязка.
Пример соединения двух UNO:
UART на Arduino:
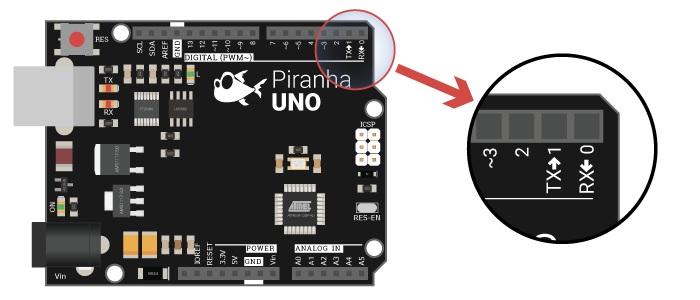
На Arduino и Arduino-совместимых платах аппаратный UART обозначается символами RX и TX рядом с соответствующими выводами. На Arduino UNO/Piranha UNO это 0 и 1 цифровые выводы:
Arduino UNO/Piranha UNO
В скетче инициализируется функцией begin() в коде функции setup():
Пример:
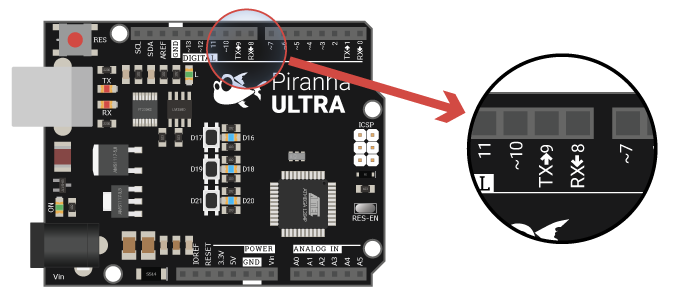
Piranha ULTRA
На Piranha ULTRA присутствуют два аппаратных UART. Один на тех же выводах, что и UNO, второй на 8 (RX) и 9 (TX) выводах:
В Arduino IDE второй аппаратный UART называется Serial1 (Сериал один), и инициализируется так же как и первый:
Простой пример для копирования буфера первого UART'а во второй и наоборот:
Arduino MEGA
У Arduino MEGA, помимо UART'a на цифровых выводах 0 и 1 как и у UNO, присутствуют ещё три аппаратных UART. На плате это выводы 19 (RX1), 18 (TX1), 17 (RX2), 16 (TX2) и 15 (RX3), 14 (TX3) соответственно. UART совместимый по расположению с UNO обозначен RX0, TX0:
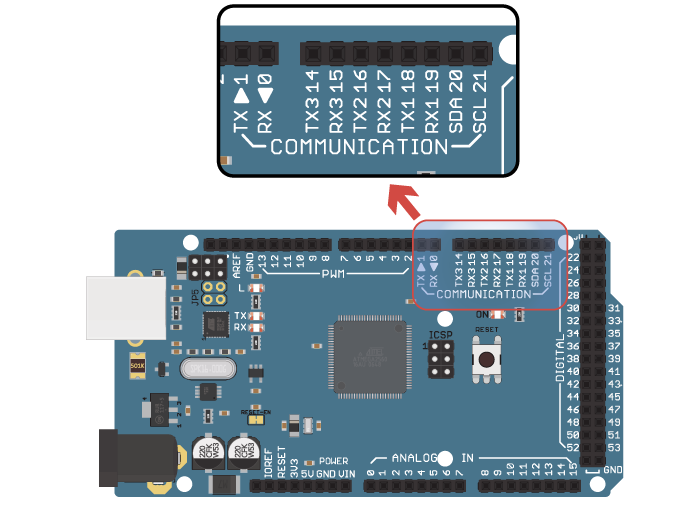
На заметку: На многих Arduino и Arduino-совместимых платах UART0 используется для загрузки скетчей, так что если Ваш скетч не загружается, проверьте эти выводы. Во время загрузки скетча к ним ничего не должно быть подключено.
Отладка проектов при помощи UART
В совокупности с монитором последовательного порта UART может быть очень полезен для отладки кода. Например, если не понятно доходит ли Ваш код до определённого места или какие значения принимает переменная, можно вызвать функцию println() и вывести значение переменной или какое-нибудь сообщение в монитор порта. В Arduino IDE монитор порта находится в меню Инструменты -> Монитор порта, так же его можно вызвать нажав пиктограмму лупы в правом верхнем углу главного окна Arduino IDE или вызвать с клавиатуры комбинацией клавиш Ctrl+Shift+M. Перед вызовом монитора порта необходимо выбрать порт с которым Вы хотите работать. Сделать это можно в меню Инструменты -> Порт.
Для удобства отладки можно указать директивы препроцессора языка Си #define , #ifdef , #ifndef
Пример:
Программный UART на Arduino
Помимо аппаратного UART в Arduino можно использовать программный. Программный порт хорошо подходит для простых проектов, не критичных к времени работы кода или для отладки проектов, позволяя не отключать модули использующие UART во время загрузки сетчей. При его использовании нужно лишь помнить что никакой другой код не может выполняться пока программа занимается считыванием данных из него и передача может осуществляться только в полудуплексном или симплексном режимах. Так же на программный RX можно назначать только те выводы, которые поддерживают прерывание по смене уровней. На UNO, например, это все цифровые выводы, кроме 13-го. Прежде чем собирать свой проект, проконсультируйтесь с инструкцией к конкретной плате.
Пример использования программного порта:
Далее к программному порту нужно обращаться через объект mySerial . Например: mySerial.write(data); .
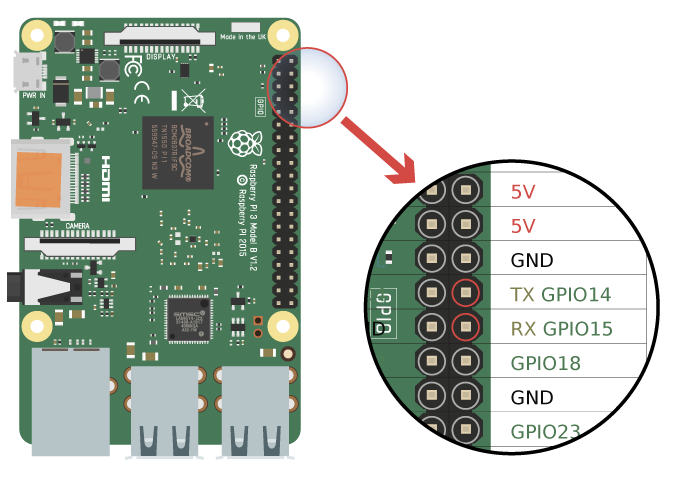
UART на Raspberry Pi:
На Raspberry Pi UART находится на выводах колодки 8 — TX (GPIO14) и 10 — RX (GPIO15)
Перед работой с последовательным портом необходимо его включить. Сделать это можно из эмулятора терминала командой sudo raspi-config -> Interfacing options -> Serial -> No -> Yes -> OK -> Finish или из графической среды в главном меню -> Параметры -> Raspberry Pi Configuration -> Interfaces -> Serial Port
Пример работы с последовательным портом на Python:
Данный пример выводит строку «iArduino.ru» в последовательный порт Raspberry и ждёт данных из последовательного порта.
Подробнее о UART:
Параметры
При обозначении параметров UART принято использовать короткую запись ЦИФРА—БУКВА—ЦИФРА
- ЦИФРА — количество бит в кадре
- от 5 до 9 бит. Обычно 8.
- N — None (Отсутствует) без бита чётности
- E — Even (Чётный). Проверка данных на чётность. Перед стоп-битом в кадр добавляется бит: 0 если в кадре было нечётное количество единиц, 1 — если чётное.
- O — Odd (Нечётный). Проверка данных на нечётность. Перед стоп-битом в кадр добавляется бит: 1 если в кадре было нечётное количество единиц, 0 — если чётное.
- 1, 1.5, 2. Продолжительность стоп-бита (1, 1.5 или 2 битовых интервала)
Таким образом, стандартные настройки в Arduino: 8-N-1
Кадрирование данных
При приёме-передаче данных каждое устройство ориентируется на своё внутреннее тактирование. Обычно это тактирование от 8 до 16 раз быстрее скорости передачи данных и обычно отсчитывается от стартового бита. Именно поэтому необходимо чтобы оба устройства были настроены на одну и ту же скорость передачи.
Так же при передаче данных присутствуют синхронизирующие биты, именуемые старт-бит и стоп-бит. Старт-бит сигнализирует о начале передачи данных и стоп-бит, соответственно об окончании.
Рассмотрим кадр данных:
При разговорах о серийный протоколах принято использовать такие слова как кадр и пакет. Кадр — интервал от старт-бита до стоп-бита. Пакет — количество кадров полезных данных. При этом не стоит путать кадр и байт: байт — это только сами данные, не включающие в себя синхронизирующие и проверочные биты.
Старт-бит:
При отсутствии передачи линия удерживается в состоянии логической единицы (в случае TTL Arduino это 5 вольт или Vcc). Как только передающее устройство притягивает линию к 0 (GND или 0 вольт в случае Arduino), это сигнализирует принимающему устройству о том что сейчас будет передача данных.
Данные:
При появлении старт-бита на линии принимающее устройство начинает отсчитывать время в соответствии с установленной скоростью и считывать состояния линии через определённые промежутки времени в соответствии с установленным количеством бит данных, после этого.
Стоп-бит:
По завершении передачи данных принимающее устройство ожидает стоп-бит, который должен быть на уровне логической единицы. Если по завершении кадра удерживается логический ноль, значит данные неверны. Если логический ноль удерживается время, превышающее длину кадра в 1,5 раза, такое состояние именуется break (разрыв линии, исторически пошло от устройств, использующих токовую петлю для передачи данных). Некоторые передатчики вызывают это состояния специально перед посылкой пакета данных. Некоторые приёмники считают такое состояние за неправильно выставленную скорость и сбрасывают свои настройки на установки «по умолчанию».
Скорость передачи данных
Скорость изменения логических уровней (импульсов) на линии принято измерять в бодах. Единица измерения названа так в честь французского изобретателя Жана Мориса Эмиля Бодо.
Скорость при использовании UART может быть любой, единственное требование — скорости передающего и принимающего должны быть одинаковы. Стандартная скорость UART принята за 9600 бод. Arduino без проблем и лишних настроек может принимать и передавать данные на скоростях до 115200 бод.
Так как при передаче данных присутствуют синхронизирующие биты, именуемые старт-бит и стоп-бит, не совсем корректно говорить, что скорость 9600 бод равна 9600 битам в секунду. Если речь идёт о полезных данных, то реальная скорость на 20% ниже. Например, если выставлены параметры 8-N-1 и 9600 бод, то на передачу одного байта уходит десять бит, и 9600/10 = 960 байт, что равно 7680 битам в секунду.
Методы связи
UART позволяет одновременно передавать и принимать данные, однако не всегда это возможно или нужно. Например, если Вам нужно только получать не критические данные (которые можно проверить следующим пакетом, например расстояние, посылаемое лидаром каждые несколько сотен миллисекунд) от цифрового датчика или любого другого устройства и не нужно ничего передавать, такой метод называется симплексным. Всего различают три метода связи:
What is RX and TX signal?
Tx and Rx Levels. The Tx level is the power in decibels per milliwatt (dBm) at which a modem transmits its signal. The Rx level is the power in dBm of the received signal. 34, a receiver can tell its peer that the signal level is too high and the transmitter then reduces the level at which it transmits.
What TX stand for?
Texas (US postal abbreviation) TX.
What is RX and TX WIFI?
Tx data – displays the amount of transmitted data. Rx data – displays the amount of received data. Tx packets – displays the number of transmitted packets. Rx packets – displays the number of received packets.
What is Tx and Rx bytes?
TX packets is total number of packets transmitted. RX bytes is a total number of bytes received over interface. TX bytes is a total number of bytes transmitted over interface.
What does the RX stand for?
Medical prescription
Medical prescription/Full nameWhat is Rx Tx bandwidth?
bandwidth link-utilization network-measurement. Rx means Receive, and Tx means Transmit.
What does TX mean in a text?
British Dictionary definitions for TX TX. abbreviation for. Texas. text messaging thanks.
What is a good WIFI TX rate?
Ideal Signal Strength For higher-throughput applications like voice over IP or streaming video, -67 dBm is better, and some engineers recommend -65 dBm if you plan to support mobile devices like iPhones and Android tablets.
What is Rx and Dx?
Rx stands for the Latin Recipe. Dx is Diagnosis. Tx is Treatment. Hx is History. Sx is Symptoms.
What is RX and TX in Arduino?
Serial communication on pins TX/RX uses TTL logic levels (5V or 3.3V depending on the board). All Arduino boards have at least one serial port (also known as a UART or USART): Serial. It communicates on digital pins 0 (RX) and 1 (TX) as well as with the computer via USB.
What is full form of Rx?
Medical prescription/Full name
The Full form of RX is ‘Medical Prescription’. The symbol “Rx” is usually said to stand for the Latin word “recipe” meaning “to take.” It is customarily part of the superscription (heading) of a prescription.Why do doctors write Rx?
Rx: A medical prescription. The symbol “Rx” is usually said to stand for the Latin word “recipe” meaning “to take.” It is customarily part of the superscription (heading) of a prescription.
What is TX and RX in networking?
TX and RX are abbreviations for Transmit and Receive, respectively. Note that these metrics are referenced to the server being monitored; Transmit FROM this server, and Receive TO this server. Units are in Bytes (not bits)
What does RX network mean?
Here are all the possible meanings and translations of the word rx network. Rx network is a consumer focused prescription management company. With its patent pending Virtual Medicine Cabinet service, consumer can receive prescriptions electronically, shop and manage her prescription by searching best price medications based on her profile.
What is TX signal?
Tx is the Transmit in Tx, a signal name in the RS-232 serial communication protocol signal pair and Rx is the Receive path in the RS-232 serial communication protocol signal pair .
RX TX: Что Это и Как Это Работает
Протоколы TX и RX (или передача и прием) используются для коммуникации между двумя устройствами. Эти протоколы используются в различных областях, таких как сетевые технологии, где они могут использоваться для передачи данных между двумя компьютерами или маршрутизаторами, а также в микроконтроллерах и микропроцессорах, где они могут использоваться для связи с периферийными устройствами.
TX и RX — это аббревиатуры от слов «Transmit» (передача) и «Receive» (прием). Они обозначают процессы передачи и приема данных между двумя устройствами. Например, в случае сетевых технологий, компьютеры могут использовать протоколы TX и RX для передачи данных между собой. Когда компьютер отправляет данные другому компьютеру, он использует протокол передачи (TX), чтобы отправить данные первому компьютеру. Затем второй компьютер использует протокол приема (RX), чтобы получить данные от первого компьютера.
Пример кода для использования TX и RX для передачи данных между двумя Arduino-устройствами:
Rx tx что из них
В радиотехнике встречаются такие обозначения как TX и RX. Расскажу на примере обычной рации. Рация может передавать сигнал, а так же принимать сигнал. Так вот у неё будут, например, обозначения: TX 400-470 МГц, RX 320-512 МГц. Это значит, что рация может передавать сигнал в частотах 400-470 МГц и принимать в частотах 320-512 МГц.
T — Trancieve (отправление)
R — Recieve (получение)По поводу значения буквы «X» целая философия �� не стоит заморачиваться… Главное, что вы теперь знаете — прием/передача.
ru_radio_electr
D — это data, digital, detect.. и так далее.
x — разговорно-формуловое от начала времён и систем координат.
S(x), V(x), и тому подобное.
Именно благодаря (х) вас в 4-м классе учат преобразовывать 4 общих стандартных формулы РПрД в уравнения свободного падения и\или «стреляния под углом к горизонту».
А «разговорное» (х) это просто «что-то». Оно притекает или утекает.
В строгом академическом случае — RxD и TxD никаким RD и TD неравны и равны быть не могут.
Но.
Потом пришёл CAD и его библиотеки, они поначалу жестоко противоречили ГОСТам и правилам. Потом их «приводили к». Кнутом и пряником.
На данный момент всё и все почти успокоились и большинству пофиг..В общем случае разница между TxD и TD в том что по первому может течь всё что угодно, по второму — цифровое. )
UART — Универсальный Асинхронный Приёмопередатчик
Универсальный асинхронный приёмопередатчик (Univsersal Asynchronos Reciever-Transmitter) — это физическое устройство приёма и передачи данных по двум проводам. Оно позволяет двум устройствам обмениваться данными на различных скоростях. В спецификацию UART не входят аналоговые уровни на которых ведётся общение между устройствами, UART это протокол передачи единиц и нулей, электрическую спецификацию на себя берут другие стандарты, такие как TTL (transistor-transistor logic — транзисторно-транзисторная логика), RS-232, RS-422, RS-485 и другие (RS [англ.recommended standard] — рекомендованный стандарт). На данный момент в микроконтроллерах используется в основном TTL (или точнее CMOS) UART для соединения не более двух устройств. В наших примерах мы часто называем его последовательным портом.
Подключение:
У каждого устройства, поддерживающего UART обычно обозначены два вывода: RX и TX. TX — означает transmit (передаю), RX — receive (принимаю). Отсюда становится понятно что RX одного устройства нужно подключать к TX другого. Если Вы подключите RX одного устройства к RX другого, то оба устройства будут слушать друг друга, вы соединили их входы. Если соединить TX и TX — это уже более опасно, это выходы низкого сопротивления устройств и если на одном будет логическая единица, а на втором ноль — по проводу пойдёт ток короткого замыкания (это зависит от конкретной программной или аппаратной реализации). Хотя в современных чипах от этого есть защита, на всякий случай, не стоит на неё ориентироваться. Так же необходимо объединить референсные уровни двух устройств (GND—GND), если не подразумевается гальваническая развязка.
Пример соединения двух UNO:
UART на Arduino:
На Arduino и Arduino-совместимых платах аппаратный UART обозначается символами RX и TX рядом с соответствующими выводами. На Arduino UNO/Piranha UNO это 0 и 1 цифровые выводы:
Arduino UNO/Piranha UNO
В скетче инициализируется функцией begin() в коде функции setup():
Пример:
Piranha ULTRA
На Piranha ULTRA присутствуют два аппаратных UART. Один на тех же выводах, что и UNO, второй на 8 (RX) и 9 (TX) выводах:
В Arduino IDE второй аппаратный UART называется Serial1 (Сериал один), и инициализируется так же как и первый:
Простой пример для копирования буфера первого UART'а во второй и наоборот:
Arduino MEGA
У Arduino MEGA, помимо UART'a на цифровых выводах 0 и 1 как и у UNO, присутствуют ещё три аппаратных UART. На плате это выводы 19 (RX1), 18 (TX1), 17 (RX2), 16 (TX2) и 15 (RX3), 14 (TX3) соответственно. UART совместимый по расположению с UNO обозначен RX0, TX0:
На заметку: На многих Arduino и Arduino-совместимых платах UART0 используется для загрузки скетчей, так что если Ваш скетч не загружается, проверьте эти выводы. Во время загрузки скетча к ним ничего не должно быть подключено.
Отладка проектов при помощи UART
В совокупности с монитором последовательного порта UART может быть очень полезен для отладки кода. Например, если не понятно доходит ли Ваш код до определённого места или какие значения принимает переменная, можно вызвать функцию println() и вывести значение переменной или какое-нибудь сообщение в монитор порта. В Arduino IDE монитор порта находится в меню Инструменты -> Монитор порта, так же его можно вызвать нажав пиктограмму лупы в правом верхнем углу главного окна Arduino IDE или вызвать с клавиатуры комбинацией клавиш Ctrl+Shift+M. Перед вызовом монитора порта необходимо выбрать порт с которым Вы хотите работать. Сделать это можно в меню Инструменты -> Порт.
Для удобства отладки можно указать директивы препроцессора языка Си #define , #ifdef , #ifndef
Пример:
Программный UART на Arduino
Помимо аппаратного UART в Arduino можно использовать программный. Программный порт хорошо подходит для простых проектов, не критичных к времени работы кода или для отладки проектов, позволяя не отключать модули использующие UART во время загрузки сетчей. При его использовании нужно лишь помнить что никакой другой код не может выполняться пока программа занимается считыванием данных из него и передача может осуществляться только в полудуплексном или симплексном режимах. Так же на программный RX можно назначать только те выводы, которые поддерживают прерывание по смене уровней. На UNO, например, это все цифровые выводы, кроме 13-го. Прежде чем собирать свой проект, проконсультируйтесь с инструкцией к конкретной плате.
Пример использования программного порта:
Далее к программному порту нужно обращаться через объект mySerial . Например: mySerial.write(data); .
UART на Raspberry Pi:
На Raspberry Pi UART находится на выводах колодки 8 — TX (GPIO14) и 10 — RX (GPIO15)
Перед работой с последовательным портом необходимо его включить. Сделать это можно из эмулятора терминала командой sudo raspi-config -> Interfacing options -> Serial -> No -> Yes -> OK -> Finish или из графической среды в главном меню -> Параметры -> Raspberry Pi Configuration -> Interfaces -> Serial Port
Пример работы с последовательным портом на Python:
Данный пример выводит строку «iArduino.ru» в последовательный порт Raspberry и ждёт данных из последовательного порта.
Подробнее о UART:
Параметры
При обозначении параметров UART принято использовать короткую запись ЦИФРА—БУКВА—ЦИФРА
- ЦИФРА — количество бит в кадре
- от 5 до 9 бит. Обычно 8.
- N — None (Отсутствует) без бита чётности
- E — Even (Чётный). Проверка данных на чётность. Перед стоп-битом в кадр добавляется бит: 0 если в кадре было нечётное количество единиц, 1 — если чётное.
- O — Odd (Нечётный). Проверка данных на нечётность. Перед стоп-битом в кадр добавляется бит: 1 если в кадре было нечётное количество единиц, 0 — если чётное.
- 1, 1.5, 2. Продолжительность стоп-бита (1, 1.5 или 2 битовых интервала)
Таким образом, стандартные настройки в Arduino: 8-N-1
Кадрирование данных
При приёме-передаче данных каждое устройство ориентируется на своё внутреннее тактирование. Обычно это тактирование от 8 до 16 раз быстрее скорости передачи данных и обычно отсчитывается от стартового бита. Именно поэтому необходимо чтобы оба устройства были настроены на одну и ту же скорость передачи.
Так же при передаче данных присутствуют синхронизирующие биты, именуемые старт-бит и стоп-бит. Старт-бит сигнализирует о начале передачи данных и стоп-бит, соответственно об окончании.
Рассмотрим кадр данных:
При разговорах о серийный протоколах принято использовать такие слова как кадр и пакет. Кадр — интервал от старт-бита до стоп-бита. Пакет — количество кадров полезных данных. При этом не стоит путать кадр и байт: байт — это только сами данные, не включающие в себя синхронизирующие и проверочные биты.
Старт-бит:
При отсутствии передачи линия удерживается в состоянии логической единицы (в случае TTL Arduino это 5 вольт или Vcc). Как только передающее устройство притягивает линию к 0 (GND или 0 вольт в случае Arduino), это сигнализирует принимающему устройству о том что сейчас будет передача данных.
Данные:
При появлении старт-бита на линии принимающее устройство начинает отсчитывать время в соответствии с установленной скоростью и считывать состояния линии через определённые промежутки времени в соответствии с установленным количеством бит данных, после этого.
Стоп-бит:
По завершении передачи данных принимающее устройство ожидает стоп-бит, который должен быть на уровне логической единицы. Если по завершении кадра удерживается логический ноль, значит данные неверны. Если логический ноль удерживается время, превышающее длину кадра в 1,5 раза, такое состояние именуется break (разрыв линии, исторически пошло от устройств, использующих токовую петлю для передачи данных). Некоторые передатчики вызывают это состояния специально перед посылкой пакета данных. Некоторые приёмники считают такое состояние за неправильно выставленную скорость и сбрасывают свои настройки на установки «по умолчанию».
Скорость передачи данных
Скорость изменения логических уровней (импульсов) на линии принято измерять в бодах. Единица измерения названа так в честь французского изобретателя Жана Мориса Эмиля Бодо.
Скорость при использовании UART может быть любой, единственное требование — скорости передающего и принимающего должны быть одинаковы. Стандартная скорость UART принята за 9600 бод. Arduino без проблем и лишних настроек может принимать и передавать данные на скоростях до 115200 бод.
Так как при передаче данных присутствуют синхронизирующие биты, именуемые старт-бит и стоп-бит, не совсем корректно говорить, что скорость 9600 бод равна 9600 битам в секунду. Если речь идёт о полезных данных, то реальная скорость на 20% ниже. Например, если выставлены параметры 8-N-1 и 9600 бод, то на передачу одного байта уходит десять бит, и 9600/10 = 960 байт, что равно 7680 битам в секунду.
Методы связи
UART позволяет одновременно передавать и принимать данные, однако не всегда это возможно или нужно. Например, если Вам нужно только получать не критические данные (которые можно проверить следующим пакетом, например расстояние, посылаемое лидаром каждые несколько сотен миллисекунд) от цифрового датчика или любого другого устройства и не нужно ничего передавать, такой метод называется симплексным. Всего различают три метода связи: