Kvant. Равнодействующая
Мы часто решаем задачи «с практическим содержанием», вовсе не отдавая себе отчета, насколько они сложны. Даже простой автомобиль содержит тысячи деталей, на каждую из которых действует множество сил. Просто перечислить их — и то трудно, а написать и решить столько уравнений. Однако мы умудряемся обойти это затруднение, вводя понятие равнодействующей силы. Поговорим об этом подробнее.
Для определения равнодействующей нужно все силы, действующие на тело, векторно сложить (не всегда это просто, но об этом чуть позже). Полученный суммарный вектор будет эквивалентен исходной системе сил.
Так уж и эквивалентен? Представьте, что лично вас тянут с силой 500 Н влево за левую руку и с такой же силой — вправо за правую руку. Сумма этих сил равна нулю, т. е. их как бы нет вовсе. Вам от этого легче?
На самом деле эквивалентность тут понимается в довольно узком смысле — при замене всех сил их равнодействующей не должно измениться движение тела, а вот о деформациях, разрывах и т. п. речи нет.
Какие же трудности могут возникнуть при сложении сил? Бели все они приложены в одной точке — то никаких. И складывать легко, и ясно, куда приложить суммарный вектор — равнодействующую. А если силы приложены в разных точках (чаще всего так и бывает)? Тогда придется силы переносить. Как это можно сделать? Тут нам понадобится специальная физическая величина — момент силы.
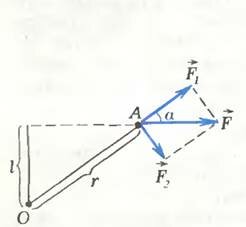
\vec F\) относительно точки О (рис. 1) равен
M = Fr \sin \alpha\) ,
где r — расстояние от точки О до точки приложения силы А. Можно сделать иначе — разложить силу \(
\vec F\) на две составляющие — вдоль r и перпендикулярно r. Вращающий момент создает только перпендикулярная составляющая \(
Конечно, это просто предыдущая формула, переписанная немного иначе, но во многих задачах удобнее пользоваться именно ею.
Легко видеть, что при переносе силы \(
\vec F\) вдоль линии ее действия момент силы не изменяется, поэтому такой перенос допустим. (Заметим, что деформации тела при переносе точки приложения силы изменяются. Это легко понять на простом примере. Потянем привязанную одним концом к стене резиновую ленту вначале за середину, а потом за второй конец — она растянется неодинаково.)
Теперь вернемся к равнодействующей. Если силы приложены в разных точках, но линии их действия пересекаются в одной,— опять все просто. Перенесем силы вдоль линий их действия в эту точку и сложим — все, как в первом случае. Бели же линии действия сил не пересекаются в одной точке, задача нахождения равнодействующей усложняется.
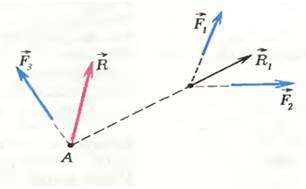
Разберем для простоты частный случай, когда все векторы сил лежат в одной плоскости (плоская система сил). Можно попробовать решить задачу за несколько шагов — складывая силы попарно, как показано на рисунке 2. Вначале сложим силы \(
\vec F_2\) — получим вектор \(
\vec R_1\), а потом сложим его с вектором \(
\vec F_3\). Равнодействующая \(
\vec R\) приложена в точке А.
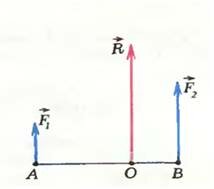
Так можно получить ответ не во всех случаях. Проблемы возникают, если векторы сил параллельны. Рассмотрим пример: нужно найти равнодействующую параллельных сил \(
\vec F_2\) (рис. 3). Ясно, что модуль равнодействующей равен сумме F1 и F2, а вот в какой точке должна быть приложена равнодействующая? Тут поможет простое рассуждение: какую бы точку приложения мы ни взяли, все равно момент равнодействующей относительно оси, проходящей через эту точку, равен нулю. Но при замене сил их равнодействующей моменты меняться не должны — значит, нужно взять такую точку, относительно которой суммарный момент исходной системы сил равен нулю. В нашем примере эту точку О можно найти из условия
F_1 \cdot AO = F_2 \cdot OB\) .
\vec F_2\) направлены в разные стороны, то точка О окажется за пределами отрезка АВ, ближе к той из сил, которая по величине больше. (Убедитесь в этом самостоятельно.)
Задачи, где нужно находить равнодействующую параллельных сил, вы наверняка решали. Так, обычно силы тяжести, приложенные к разным частям тела, считают параллельными. Центр тяжести тела — это как раз и есть точка приложения равнодействующей этих сил. Вот почему, например, тело, закрепленное на оси, которая проходит через центр тяжести тела, находится в равновесии.
Есть один важный частный случай параллельной системы сил, когда равнодействующую найти нельзя. Так будет для двух параллельных сил, которые равны по величине и противоположны по направлению. Эту систему называют парой сил. Попытка найти точку приложения пары сил приводит к делению на нуль — найти эту точку не удается. У пары сил есть одно интересное свойство: ее момент одинаков относительно любой оси вращения (проверьте это). Оказывается, таким свойством обладает любая система сил, сумма которых равна нулю (пара сил — частный случай такой системы).
Но именно такими системами сил мы и интересуемся, когда говорим об условиях равновесия тел (статика). Одно из условий — сумма сил равна нулю. Отсюда вытекает важное следствие: уравнение моментов, т. е. второе условие равновесия — сумма моментов равна нулю, можно записывать в этом случае относительно любой точки, в том числе и не лежащей внутри тела. Эту точку следует выбирать из соображений простоты получающегося уравнения (удобно ее взять, например, на пересечении линий действия нескольких сил, особенно тех, которые мы не хотим находить).
Законы сложения сил в механике
При воздействии на одно тело нескольких сил одновременно тело начинает двигаться с ускорением, являющимся векторной суммой ускорений, которые бы возникли под воздействием каждой силы по отдельности. К действующим на тело силам, приложенным к одной точке, применяется правило сложения векторов.
Векторная сумма всех сил, одновременно воздействующих на тело, это сила равнодействующая, которая определяется по правилу векторного сложения сил:
R → = F 1 → + F 2 → + F 3 → + . . . + F n → = ∑ i = 1 n F i → .
Равнодействующая сила действует на тело также, как и сумма всех действующих на него сил.
Правило параллелограмма и правило многоугольника
Для сложения 2 -х сил используют правило параллелограмма (рисунок 1 ).
Рисунок 1 . Сложение 2 -х сил по правилу параллелограмма
Выведем формулу модуля равнодействующей силы с помощью теоремы косинусов:
R → = F 1 → 2 + F 2 → 2 + 2 F 1 → 2 F 2 → 2 cos α
При необходимости сложения более 2 -х сил используют правило многоугольника: от конца
1 -й силы необходимо провести вектор, равный и параллельный 2 -й силе; от конца 2 -й силы необходимо провести вектор, равный и параллельный 3 -й силе и т.д.
Рисунок 2 . Сложение сил правилом многоугольника
Конечный вектор, проведенный от точки приложения сил в конец последней силы, по величине и направлению равняется равнодействующей силе. Рисунок 2 наглядно иллюстрирует пример нахождения равнодействующей сил из 4 -х сил: F 1 → , F 2 → , F 3 → , F 4 → . Причем суммируемые векторы совсем необязательно должны быть в одной плоскости.
Результат действия силы на материальную точку будет зависеть только от ее модуля и направления. У твердого тела есть определенные размеры. Потому силы с одинаковыми модулями и направлениями вызывают разные движения твердого тела в зависимости от точки приложения.
Линией действия силы называют прямую, проходящую через вектор силы.
Рисунок 3 . Сложение сил, приложенных к различным точкам тела
Если силы приложены к различным точкам тела и действуют не параллельно по отношению друг к другу, тогда равнодействующая приложена к точке пересечения линий действия сил (рисунок 3 ). Точка будет находиться в равновесии, если векторная сумма всех сил, действующих на нее, равняется 0 : ∑ i = 1 n F i → = 0 → . В данном случае равняется 0 и сумма проекций данных сил на любую координатную ось.
Разложение вектора силы по направлениям
Разложение сил на две составляющие – это замена одной силы 2 -мя, приложенными в той же точке и производящими на тело такое же действие, как и эта одна сила. Разложение сил осуществляется, как и сложение, правилом параллелограмма.
Задача разложения одной силы (модуль и направление которой заданы) на 2 , приложенные в одной точке и действующие под углом друг к другу, имеет однозначное решение в следующих случаях, когда известны:
- направления 2 -х составляющих сил;
- модуль и направление одной из составляющих сил;
- модули 2 -х составляющих сил.
Необходимо разложить силу F на 2 составляющие, находящиеся в одной плоскости с F и направленные вдоль прямых a и b (рисунок 4 ). Тогда достаточно от конца вектора F провести 2 прямые, параллельные прямым a и b . Отрезок F A и отрезок F B изображают искомые силы.
Рисунок 4 . Разложение вектора силы по направлениям
Второй вариант данной задачи – найти одну из проекций вектора силы по заданным векторам силы и 2 -й проекции (рисунок 5 а ).
Рисунок 5 . Нахождение проекции вектора силы по заданным векторам
Во втором варианте задачи необходимо построить параллелограмм по диагонали и одной из сторон, как в планиметрии. На рисунке 5 б изображен такой параллелограмм и обозначена искомая составляющая F 2 → силы F → .
Итак, 2 -й способ решения: прибавим к силе силу, равную — F 1 → (рисунок 5 в ). В итоге получаем искомую силу F → .
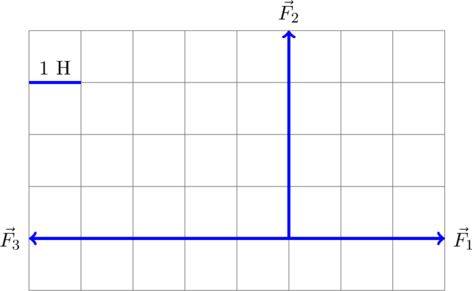
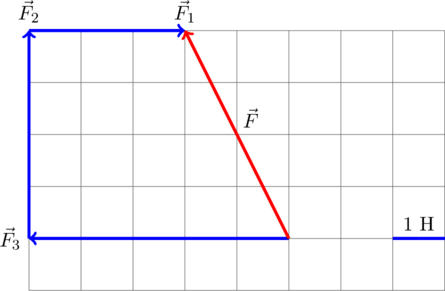
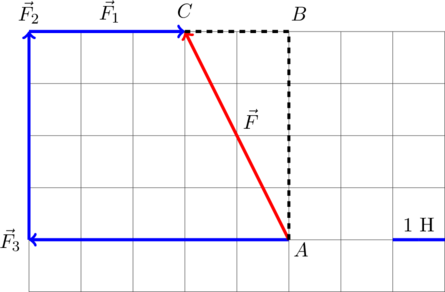
Три силы F 1 → = 1 Н ; F 2 → = 2 Н ; F 3 → = 3 Н приложены к одной точке, находятся в одной плоскости (рисунок 6 а ) и составляют углы с горизонталью α = 0 ° ; β = 60 ° ; γ = 30 ° соответственно. Необходимо найти равнодействующую силу.
Решение
Рисунок 6 . Нахождение равнодействующей силы по заданным векторам
Нарисуем взаимно перпендикулярные оси О Х и O Y таким образом, чтобы ось О Х совпадала с горизонталью, вдоль которой направлена сила F 1 → . Сделаем проекцию данных сил на координатные оси (рисунок 6 б ). Проекции F 2 y и F 2 x отрицательны. Сумма проекций сил на координатную ось О Х равняется проекции на данную ось равнодействующей: F 1 + F 2 cos β — F 3 cos γ = F x = 4 — 3 3 2 ≈ — 0 , 6 Н .
Точно также для проекций на ось O Y : — F 2 sin β + F 3 sin γ = F y = 3 — 2 3 2 ≈ — 0 , 2 Н .
Модуль равнодействующей определим с помощью теоремы Пифагора:
F = F x 2 + F y 2 = 0 , 36 + 0 , 04 ≈ 0 , 64 Н .
Направление равнодействующей найдем при помощи угла между равнодействующей и осью (рисунок 6 в ):
t g φ = F y F x = 3 — 2 3 4 — 3 3 ≈ 0 , 4 .
Сила F = 1 к Н приложена в точке В кронштейна и направлена вертикально вниз (рисунок 7 а ). Необходимо найти составляющие данной силы по направлениям стержней кронштейна. Все необходимые данные отображены на рисунке.
Решение
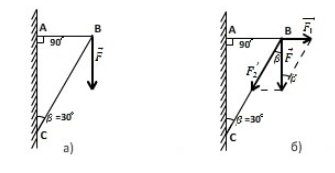
Рисунок 7 . Нахождение составляющих силы F по направлениям стержней кронштейна
Дано:
F = 1 к Н = 1000 Н
Пускай стержни прикручены к стене в точках А и С . На рисунке 7 б изображено разложение силы F → на составляющие вдоль направлений А В и В С . Отсюда понятно, что
Равнодействующая сила
Законы Ньютона – математическая абстракция. В реальности причиной движения или покоя тел, а также их деформации, выступают сразу несколько сил. Поэтому важным дополнениям к законам механики будет введение понятия равнодействующей силы и его применение.
О причинах изменений
Классическая механика разделена на два раздела – кинематику, при помощи уравнений описывающую траекторию движения тел, и динамику, которая разбирается с причинами изменения положения объектов или самих объектов.
Причиной изменений выступает некоторая сила, которая есть мера действия на тело других тел или силовых полей (например, электромагнитное поле или гравитация). К примеру, сила упругости вызывает деформацию тела, сила тяжести – падение тел на Землю.
Сила – это векторная величина, то есть, ее действие – направленное. Модуль силы в общем случае пропорционален некоему коэффициенту (для деформации пружины – это ее жесткость), а также параметрам действия (масса, заряд).
Сложение сил
В случае, когда на тело действует n сил, говорят о равнодействующей силе, а формула второго закона Ньютона принимает вид:
$m\vec a = \sum\limits_
Рис. 1. Равнодействующая сил.
Поскольку F – векторная величина, сумма сил называется геометрической (или векторной). Такое сложение выполняется по правилу треугольника или параллелограмма, либо по компонентам. Поясним каждый метод на примере. Для этого запишем формулу равнодействующей силы в общем виде:
$F = \sum\limits_
А силу $F_i$ представим в виде:
Тогда суммой двух сил будет новый вектор $F_
 Рис. 2. Покомпонентное сложение векторов.
Рис. 2. Покомпонентное сложение векторов.
Абсолютное значение равнодействующей можно рассчитать так:
Теперь дадим строгое определение: равнодействующая сила есть векторная сумма всех сил, оказывающих влияние на тело.
Разберем правила треугольника и параллелограмма. Графически это выглядит так:
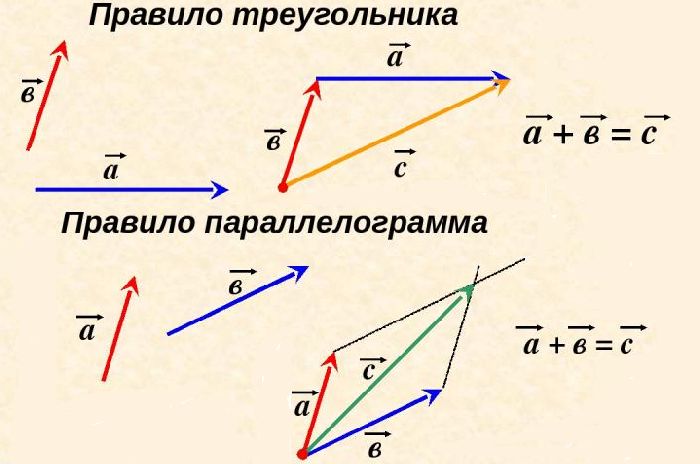
Рис. 3. Правило треугольника и параллелограмма.
Внешне они кажутся различными, но когда доходит до вычислений, сводятся к нахождению третьей стороны треугольника (или, что тоже самое, диагонали параллелограмма) по теореме косинусов.
Если сил больше двух, иногда удобней пользоваться правилом многоугольника. По своей сути – это всё тот же треугольник, только повторенный на одном рисунке некоторое количество раз. В случае, если по итогу контур получился замкнутым, общее действие сил равно нулю и тело покоится.
Задачи
- На ящик, размещенный в центре декартовой прямоугольной системы координат, действуют две силы: $F_1 = (5, 0)$ и $F_2 = (3, 3)$. Рассчитать равнодействующую двумя методами: по правилу треугольника и при помощи покомпонентного сложения векторов.
Решение
Равнодействующей силой будет векторная сумма $F_1$ и $F_2$.
$\vec F = \vec F_1 + \vec F_2 = (5+3, 0+3) = (8, 3)$
Абсолютное значение равнодействующей силы:
Теперь получим тоже значение при помощи правила треугольника. Для этого сначала найдем абсолютные значения $F_1$ и $F_2$, а также угол между ними.
Угол между ними – 45˚, так как первая сила параллельна оси Оx, а вторая делит первую координатную плоскость пополам, то есть является биссектрисой прямоугольного угла.
Теперь, разместив вектора по правилу треугольника, рассчитаем по теореме косинусов равнодействующую:
- На машину действуют три силы: $F_1 = (-5, 0)$, $F_2 = (-2, 0)$, $F_1 = (7,0)$. Какова их равнодействующая?
Решение
Достаточно сложить иксовые компоненты векторов:
Что мы узнали?
В ходе урока было введено понятие равнодействующей сил и рассмотрены различные методы ее расчета, а также введена запись второго закона Ньютона для общего случая, когда количество сил неограниченно.
Модуль равнодействующей силы
В данной статье рассказано о том, как найти модуль равнодействующей сил, действующих на тело. Репетитор по математике и физике объяснит вам, как найти суммарный вектор равнодействующей сил по правилу параллелограмма, треугольника и многоугольника. Материал разобран на примере решения задачи из ЕГЭ по физике.
Как найти модуль равнодействующей силы
| Сила, которая оказывает на материальную точку такое же действие, как и несколько других сил, называется равнодействующей этих сил. Для нахождения вектора равнодействующей силы необходимо геометрически (векторно) сложить все силы, которые действуют на материальную точку. |
Напомним, что сложить векторы геометрически можно с помощью одного из трех правил: правила параллелограмма, правила треугольника или правила многоугольника. Разберём каждое из этих правил в отдельности.
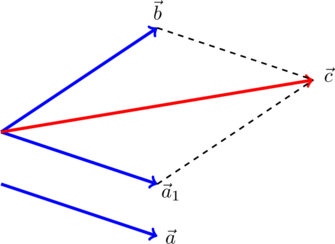
1. Правило параллелограмма. На рисунке по правилу параллелограмма складываются векторы  и
и  . Суммарный вектор есть вектор
. Суммарный вектор есть вектор  :
:
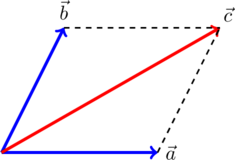
Если векторы и не отложены от одной точки, нужно заменить один из векторов равным и отложить его от начала второго вектора, после чего воспользоваться правилом параллелограмма. Например, на рисунке вектор заменен на равный ему вектор  , и
, и  :
:
2. Правило треугольника. На рисунке по правилу треугольника складываются векторы и . В сумме получается вектор  :
:
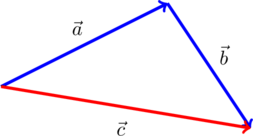
Если вектор отложен не от конца вектора , нужно заменить его равным и отложенным от конца вектора , после чего воспользоваться правилом треугольника. Например, на рисунке вектор заменен равным ему вектором  , и
, и  :
:
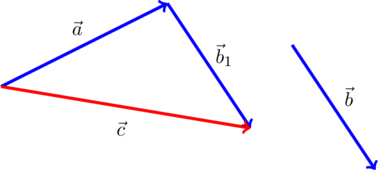
3. Правило многоугольника. Для того, чтобы сложить несколько векторов по правилу параллелограмма, необходимо от произвольной точки  отложить вектор, равный первому складываемому вектору, от его конца отложить вектор, равный второму складываемому вектору, и так далее. Суммарным будет вектор, проведенный из точки в конец последнего отложенного вектора. На рисунке
отложить вектор, равный первому складываемому вектору, от его конца отложить вектор, равный второму складываемому вектору, и так далее. Суммарным будет вектор, проведенный из точки в конец последнего отложенного вектора. На рисунке  :
:
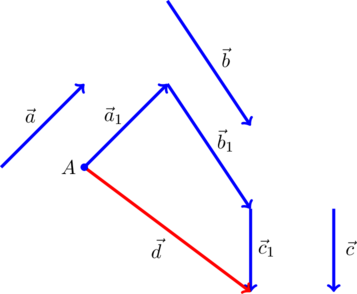
Задача на нахождение модуля равнодействующей силы
Разберем задачу на нахождение равнодействующей сил на конкретном примере из демонстрационного варианта ЕГЭ по физике 2016 года.
Для нахождения вектора равнодействующей сил найдём геометрическую (векторную) сумму всех изображенных сил, используя правило многоугольника. Упрощенно говоря (не вполне корректно с математической точки зрения), каждый последующий вектор нужно отложить от конца предыдущего. Тогда суммарный вектор будет исходить из точки, из который отложен первоначальный вектор, и приходить в точку, где заканчивается последний вектор:
Требуется найти модуль равнодействующей сил, то есть длину получившегося вектора. Для этого рассмотрим вспомогательный прямоугольный треугольник  :
:
Требуется найти гипотенузу  этого треугольника. «По клеточкам» находим длину катетов:
этого треугольника. «По клеточкам» находим длину катетов:  Н,
Н,  Н. Тогда по теореме Пифагора для этого треугольника получаем:
Н. Тогда по теореме Пифагора для этого треугольника получаем:  Н. То есть искомый модуль равнодействующей сил равен
Н. То есть искомый модуль равнодействующей сил равен  Н.
Н.
Итак, сегодня мы разобрали, как находить модуль равнодействующей силы. Задачи на нахождение модуля равнодействующей силы встречаются в вариантах ЕГЭ по физике. Для решения этих задач необходимо знать определение равнодействующей сил, а также уметь складывать векторы по правилу параллелограмма, треугольника или многоугольника. Стоит немного потренироваться, и вы научитесь решать эти задачи легко и быстро. Удачи вам в подготовке к ЕГЭ по физике!