На что влияет частота сигнала
Частота f сигнала — величина, обратная его периоду T: $$ f = 1 / T. $$ Из определения следует, что частота численно равна количеству колебаний (количеству периодов) в единицу времени.
Понятия частоты и периода применимы, строго говоря, только к периодическим сигналам (функциям). Для заданной периодической функции, частота и период — постоянные величины.
Реальные сигналы не идеальны, они никогда не бывают строго периодическими. Тем не менее, по отношению к реальным сигналам также используется понятие частоты. Что понимают под частотой в этом случае?
Введение
Частота — важный параметр сигнала. Существует огромное множество случаев, когда необходимо знать частоту сигнала, или иметь возможность измерить частоту с высокой точностью (с целью тестирования, диагностики устройств и поиска неисправностей; для выполнения измерений в таких измерительных системах, где используется преобразование величин в частоту сигнала и т.д.). Очень часто требуется генерировать сигнал с нужной частотой: многие устройства содержат в себе генераторы опорного сигнала, от точности установки и стабильности частоты которых, зависит нормальная работа устройств. Например, очень жёсткие требования предъявляются к передатчикам (которые не должны мешать соседям по диапазону). Но и в приёмнике частота гетеродина также должна быть точно установлена и стабильна, от этого зависит точность настройки на передатчик и качество приёма. От качества опорного генератора напрямую зависит точность многих приборов (таких, например, как цифровые частотомеры или, скажем, обычные часы).
Но что это такое — частота? Рассмотрим подробнее этот вопрос.
Понятие частоты периодического сигнала
Как уже было отмечено в самом начале, понятия периода и частоты применимы только к периодическим * сигналам (или функциям). Функция u(t) называется периодической, если существует число T > 0 такое, что для любого t $$ u(t \pm T) = u(t), $$ значение T называют периодом функции.
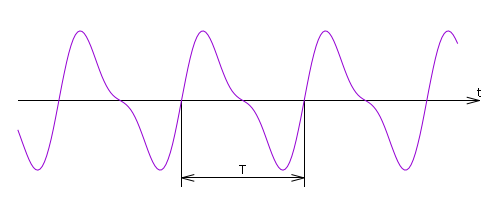
Рис. %img:pf
Понятно, что при таком определении периодическая функция имеет бесконечно много периодов: если некоторая величина является периодом функции, то и любая кратная ей величина также будет периодом. Но если периодическая функция — не константа, то для неё существует наименьший период (наименьшая положительная величина, являющаяся периодом). Далее под периодом будем подразумевать именно наименьший период.
* В математике также рассматриваются "почти периодические" функции, но это весьма специфический вопрос и в математике этим термином обозначается не совсем то, что имеется в виду под "почти периодическими" функциями в технике.
Частота периодического сигнала (функции) — величина, обратная его периоду: $$ f = 1 / T. $$
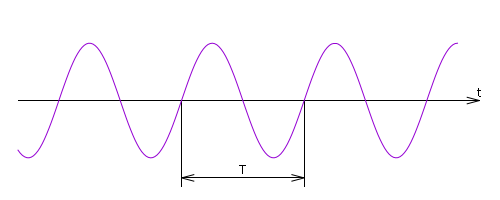
Рис. %img:hf
Примером периодического сигнала является гармонический (синусоидальный) сигнал (рис. %img:hf). Для того чтобы полностью описать такой сигнал, достаточно задать всего три параметра: амплитуду сигнала A, период T (или, что равнозначно, частоту f) и начальную фазу \( <\phi>_0 \), $$ u(t)=A \sin \left( \frac <2 \pi>T t + <\phi>_0 \right). $$ Запишем то же самое с использованием частоты: $$ u(t) = A \sin( 2 \pi f t + <\phi>_0). $$ Наряду с частотой сигнала, также рассматривается циклическая (также иногда называемая круговой или угловой) частота \( \omega = 2 \pi f \), используя которую, выражение для синусоидального сигнала можем записать следующим образом: $$ u(t) = A \sin( \omega t + <\phi>_0). $$ Иногда слово "циклическая" опускают, если из контекста или обозначений понятно, о какой именно частоте идёт речь.
Последнее выражение можно записать ещё проще: $$ u(t) = A \sin \phi(t), $$ где \( \phi(t) = \omega t + <\phi>_0 \) — фаза сигнала. Нетрудно заметить, что фаза синусоидального сигнала линейно растёт со временем. Со скоростью, равной циклической частоте: $$ \frac
Частота реального сигнала. Мгновенная частота
Строгие определения и формальные теоретические подходы хороши для математики. В реальной жизни, в технике, сигналы никогда не бывают периодическими. Прежде всего, потому что никакой сигнал не может длиться бесконечно долго. Сигнал имеет начало и конец, что уже нарушает идеальную периодичность. Но даже если отвлечься от этого, скорее философского вопроса о конечности существования, то и за время существования сигнала, строгая периодичность недостижима. С другой стороны, некоторая степень регулярности и повторяемости характерна для очень многих реальных сигналов.
Часто такие сигналы оказывается удобно представлять в квазигармонической форме $$ \begin
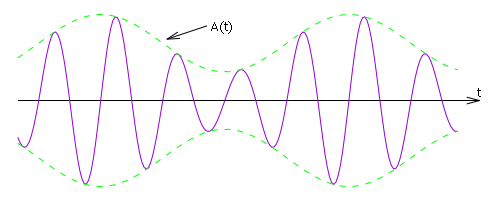
Рис. %img:cf
Функция A(t) описывает поведение огибающей сигнала. Фаза \( \phi(t) \) определяет поведение сигнала в пределах "периода" и "повторяемость" сигнала. В частности, фаза определяет моменты прохождения сигнала через 0: если \( \sin \phi = 0 \), то понятно, что и \( u(t) = 0 \); это происходит, когда $$ \phi (t) = k \pi, $$ где k — целое.
Мгновенной частотой такого квазигармонического сигнала, по аналогии с гармоническим, называют скорость изменения его фазы: $$ \omega = \frac
Заметим, что даже в случае периодических с математической точки зрения, идеальных сигналов, иногда бывает удобнее рассматривать их как "не вполне" периодические, с изменяющейся во времени амплитудой и/или частотой.
Простейший пример — модулированный по амплитуде сигнал при модуляции его гармоническим сигналом: $$ u(t) = A (1 + m \sin \Omega t) \sin \omega t, $$ предполагаем, что \( \Omega \ll \omega \). Для простоты начальные фазы считаем равными 0.
Очевидно, что период \( T = 2 \pi / \omega \) несущего колебания уже не является периодом модулированного сигнала из-за множителя \( (1 + m \sin \Omega t) \), который изменится через время T.
Легко показать, что если частота несущего сигнала кратна частоте модулирующего сигнала, т.е. $$ \omega = k \Omega, $$ k — целое, то период модулированного сигнала оказывается равным периоду модулирующего. Если частоты не кратны, но соизмеримы (их отношение выражается рациональным числом), то период сигнала оказывается ещё больше, он будет в целое количества раз больше периода низкочастотного модулирующего колебания. А если частоты несоизмеримы (их отношение не является рациональным числом), то модулированный сигнал, строго говоря, оказывается непериодическим.
Излишне говорить, что с практической точки зрения такой подход совершенно неудобен; истинные частота и период рассмотренного сигнала абсолютно не отражают его реальных свойств. В то же время, мгновенная частота, которая в случае амплитудно-модулированного сигнала равна частоте несущего сигнала \( \omega \), оказывается намного более объективной и информативной характеристикой сигнала.
Перейдём теперь к вопросу об измерении частоты. В общем случае, измерение мгновенной частоты сигнала — достаточно сложная задача. Она заметно упрощается, когда заранее имеется информация о характере сигнала (известен вид функции, описывающей сигнал). Тогда, отслеживая мгновенные значения сигнала и обрабатывая эти данные (с помощью аналоговой цепи или цифровыми методами), сможем определять мгновенную частоту сигнала в любой момент. Получаемая при этом точность, по ряду причин, часто оказывается не слишком высокой.
Очень точному измерению поддаётся среднее значение частоты сигнала, об этом далее.
Среднее значение частоты. Измерение частоты
Пусть мы имеем сигнал вида $$ u(t)=A(t) \sin \phi (t), $$ где A(t) > 0. Тогда точки, в которых сигнал проходит через нулевые значения, определяются только фазой. Возьмём две последовательные точки t1 и t2 такие, что в этих точках $$ \sin \phi(t) = 0, $$ а значит и $$ u(t) = 0, $$ причём u(t) проходит через нулевое значение в этих точках в одном направлении. Например, от отрицательных значений к положительным (рис. %img:mf). Это означает, что \( \sin’ \phi \) в этих точках имеет одинаковый знак, в нашем случае — оба значения положительные.
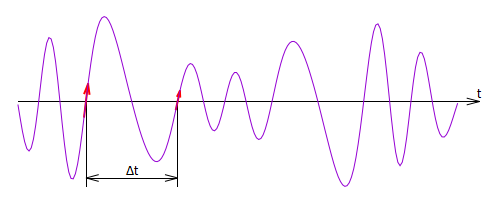
Рис. %img:mf
С учётом свойств периодичности тригонометрических функций, можем утверждать, что значения фазы в указанных точках отличаются на \( 2 \pi \): $$ \phi(t_2) — \phi(t_1) = 2 \pi. $$
Так как мгновенная циклическая частота \( \omega = d \phi / dt \), то эта же разность фаз может быть вычислена интегрированием мгновенной частоты: $$ \phi(t_2) — \phi(t_1) = \int_
Далее воспользуемся тем, что интегрирование функции и нахождение её среднего — взаимосвязанные операции. По определению, среднее значение x на отрезке [t1, t2] равно $$ \bar
Получили что для того, чтобы измерить среднее значение частоты, достаточно измерить промежуток времени между двумя моментами, когда сигнал проходит через нулевое значение (в одном направлении). Впрочем, этот результат вполне соответствует интуитивному представлению о периоде реального сигнала и соотношению между периодом и частотой.
Если сигнал высокочастотный, то интервал \( \Delta t \) становится очень малым и, его оказывается трудно измерить с высокой точностью. Тогда оказывается выгодным взять интервал, за который фаза сигнала возрастает не на \( 2 \pi \), а на кратное этой величине значение, т.е \( 2 \pi m \), где m — целое: $$ \Delta \phi = 2 \pi m. $$ Иначе говоря, измеряем длительность не одного периода сигнала, а длительность m периодов. Тогда средняя частота за соответствующий интервал времени составит $$ \bar f = \frac 1 <2 \pi \Delta t>\int_
Для точного измерения \( \Delta t \) хорошо подходят цифровые методы. Покажем, как выполнить измерение. Преобразуем исходный сигнал в цифровой таким образом, что значениям \( u(t) \lt 0 \) будет соответствовать логический 0, а значениям \( u(t) \ge 0 \) — логическая 1 (рис. %img:df). Тогда моментам перехода исходного сигнала через 0 от отрицательных значений к положительным, будут соответствовать фронты полученного цифрового сигнала.
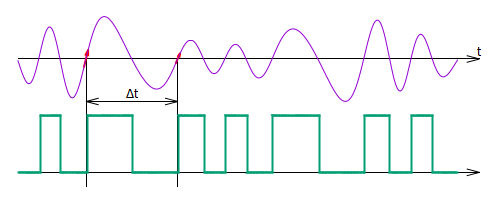
Рис. %img:df
На самом деле, обязательно наличие гистерезиса при преобразовании (порог переключения от 0 к 1 должен быть выше, чем порог обратного переключения). В противном случае, вблизи порога переключения будем получать пачки паразитных импульсов из-за наличия шумов и помех в сигнале. Но это детали реализации, не изменяющие самого принципа.
Задача определения промежутка времени между двумя заданными фронтами решается очень просто — с помощью счётчика подсчитывается количество импульсов n эталонного генератора с частотой fr (с периодом Tr) за этот промежуток времени (по первому фронту сигнала счёт запускается, по последнему — останавливается). Тогда $$ \Delta t = n T_r = n / f_r, \\ \bar f = \frac m <\Delta t>= f_r \frac m n. $$
Целое значение m задаётся точно. Подсчёт n выполняется с точностью \( \pm 1 \), поэтому относительная погрешность счёта, а значит и погрешность измерения \( \bar f \) составляет 1 / n (без учёта погрешности эталонного генератора). Для получения как можно меньшей относительной погрешности выгодно, чтобы значение n было как можно больше. Увеличивать n можно, увеличивая частоту эталонного генератора. Однако, на этом пути имеются ограничения, связанные с предельным быстродействием счётчика. Другой вариант — увеличивать длительность интервала измерения, увеличивая m. Этот подход позволяет достичь очень высокой точности измерений, но ценой увеличения длительности измерения.
Динамическая погрешность измерений
Мы нашли способ определения средней частоты сигнала за некоторый интервал времени с высокой точностью. Но если частота сигнала изменяется, средняя частота даёт слишком мало информации о сигнале. Зачастую бывает необходимо знать, как во времени изменяется мгновенная частота сигнала и насколько сильно она отклоняется от среднего значения.
Рассмотрим, как соотносятся средняя и мгновенная частота на примере сигнала, модулированного по частоте гармоническим сигналом: $$ \omega = <\omega>_0 + \Delta \omega \sin \Omega t. $$ Здесь
\( \omega \) — мгновенная частота модулированного сигнала;
\( <\omega>_0 \) — его средняя частота;
\( \Delta \omega \) — наибольшее отклонение мгновенной частоты от среднего значения;
\( \Omega \) — частота модулирующего гармонического сигнала.
Для простоты считаем, что начальная фаза модулирующего воздействия равна 0.
Так как мгновенная частота по определению \( \omega = d \phi / dt \), то фаза модулированного сигнала описывается выражением $$ \phi = \int \omega dt = \int (<\omega>_0 + \Delta \omega \sin \Omega t) dt = <\omega>_0 t — \frac <\Delta \omega> <\Omega>\cos \Omega t + <\phi>_0, $$ а сам сигнал может быть представлен в следующей форме $$ u(t) = A \sin \left( <\omega>_0 t — \frac <\Delta \omega> <\Omega>\cos \Omega t + <\phi>_0 \right), $$ впрочем, в данном случае это не столь важно.
Посмотрим, какой результат даст измерение средней частоты сигнала $$ \bar \omega = \frac 1 <\Delta t>\int_
Учитывая, что $$ \cos \alpha — \cos \beta = -2 \sin \frac <\alpha - \beta>2 \sin \frac <\alpha + \beta>2, $$ получаем $$ \bar \omega = <\omega>_0 + \frac <2 \Delta \omega> <\Omega \Delta t>\sin \frac <\Omega \Delta t>2 \sin \frac <\Omega (t_1 + t_2)>2. $$ Величина $$ \frac
Тогда $$ \bar \omega = <\omega>_0 + \frac <2 \Delta \omega> <\Omega \Delta t>\sin \frac <\Omega \Delta t>2 \sin \Omega \left( t_2 — \frac <\Delta t>2 \right). $$
Заметим, что если частота изменяется не по гармоническому закону, всё равно, мгновенную частоту как функцию можно разложить на гармонические составляющие и рассматривать воздействие операции усреднения на каждую составляющую по отдельности. Это возможно, поскольку операция усреднения является линейной.
Рассмотрим, как влияет интервал измерения на результат измерений. Предположим сначала, что частота сигнала изменяется достаточно медленно, а интервал измерения достаточно мал, так что $$ \frac <\Omega \Delta t>2 \ll 1, $$ а значит, $$ \sin \frac <\Omega \Delta t>2 \approx \frac <\Omega \Delta t>2 $$ и $$ \bar\omega \approx <\omega>_0 + \Delta \omega \sin \Omega \left( t_2 — \frac <\Delta t>2 \right). $$ То есть, если выбран достаточно малый интервал измерений, то результат измерений приближается к мгновенной частоте сигнала в момент, соответствующий середине интервала измерения (результат измерения запаздывает на \( \Delta t /2 \) относительно мгновенной частоты).
С увеличением интервала измерения уменьшается коэффициент $$ \frac <2 \Delta \omega><\Omega \Delta t>, $$ при этом в силу свойств тригонометрических функций, $$ \left| \sin \frac <\Omega \Delta t>2 \right| \le 1. $$ Так что, при $$ \Delta t \rightarrow \infty, \bar \omega \rightarrow <\omega>_0. $$
На основе полученных выводов можем должным образом выбрать интервал измерения.
1. Если хотим точно измерить среднюю частоту, влияние отклонений мгновенной частоты на результат необходимо минимизировать. Как было выяснено, для этого следует увеличивать интервал измерения. Предположим, что относительная погрешность метода составляет \( \varepsilon \). Тогда, вероятно, мы захотим, чтобы дополнительная погрешность, вносимая колебаниями частоты, не превышала этой величины: $$ \frac <2 \Delta \omega><\Omega \Delta t <\omega>_0> \lt \varepsilon, $$ откуда получаем $$ \Delta t \gt \frac <2 \Delta \omega><\Omega <\omega>_0 \varepsilon> $$ или $$ \Delta t \gt \frac <\Delta f><\pi F f_0 \varepsilon>. $$ Пример. Пусть имеем сигнал со средней частотой f0 = 1 МГц, мгновенная частота которого периодически отклоняется от среднего значения на величину \( \Delta f \) до 10 Гц; желаемое относительное отклонение результата от среднего значения \( \varepsilon \lt 10^ <-8>\). В зависимости от частоты F, с которой изменяется мгновенная частота f сигнала, выбираем интервал измерения, например: $$ F = 1 \text< Гц>: \Delta t \gt 320 \text< с>; \\ F = 50 \text< Гц>: \Delta t \gt 6.4 \text< с>; \\ F = 1 \text< кГц>: \Delta t \gt 0.32 \text< с>. $$
2. Предположим, что наоборот, требуется отследить изменения мгновенной частоты сигнала. Тогда имеет смысл выбирать малый интервал измерения. Прежде всего, чтобы обнаружить изменение частоты сигнала, которое происходит с частотой \( \Omega \), следует выбрать $$ \Delta t \lt \frac <2 \pi> <\Omega>= \frac 1 F, $$ тогда можно быть уверенным, что измеряемые отклонения не окажутся нулевыми за счёт множителя \( \sin( \Omega \Delta t / 2) \).
А если, допустим, $$ \Delta t = \frac 1 <2 F>, $$ то $$ \bar \omega = <\omega>_0 + c \Delta \omega \sin \left( t_2 — \frac <\Delta t>2 \right), $$ где коэффициент \( c \approx 0.64 \), т.е. измеряемое отклонение частоты от среднего значения составит не менее 60% от реального отклонения.
Если идёт речь о достижении как можно более высокой точности в измерении мгновенной частоты, то следует далее уменьшать интервал измерения. С уменьшением интервала, результат всё более приближается к мгновенной частоте, т.е. уменьшается динамическая погрешность измерения, но одновременно с этим растёт погрешность метода. Это ограничивает предельную точность измерения частоты путём измерения средней частоты сигнала. Не имеет смысла снижать абсолютную динамическую погрешность \( <\Delta>_2 \) до значений меньше абсолютной погрешности метода \( \Delta_1 \).
Погрешность метода (относительная и абсолютная) $$ \varepsilon = \frac 1 n = \frac 1 <\Delta t f_r>, \\ <\Delta>_1 = \varepsilon f_0 = \frac
Под динамической погрешностью будем понимать разность между наибольшим действительным отклонением \( (\Delta \omega \) или \( \Delta f) \) мгновенной частоты от среднего значения и наибольшим отклонением результата измерения от истинного значения средней частоты. Для циклической частоты погрешность может быть вычислена как $$ \Delta \omega — \frac <2 \Delta \omega> <\Omega \Delta t>\sin \frac <\Omega \Delta t>2 $$ или просто для частоты: $$ <\Delta>_2 = \Delta f — \frac <\Delta f> <\pi F \Delta t>\sin(\pi F \Delta t). $$ При малых значений аргумента, синус может быть приближённо вычислен по формуле $$ \sin x \approx x — \frac
Пример. Сигнал имеет среднюю частоту f0 = 100 кГц, мгновенная частота отклоняется от среднего значения на величину \( \Delta f = 1 \text < Гц>\), причём отклонение описывается синусоидой с частотой F = 10 Гц. Требуется определить оптимальный интервал измерения (при котором погрешность метода достигает динамической погрешности измерения), если частота опорного генератора составляет fr = 24 МГц. Вычисления по приведённой выше формуле дают результат \( \Delta t \approx 0.03\text < с>\) (абсолютная погрешность метода измерения и динамическая погрешность при этом оказываются порядка 0.14 Гц).
Другим простым, но представляющим интерес примером, является измерение средней частоты сигнала, мгновенная частота которого на некотором интервале изменяется линейно. Легко показать (настолько легко, что подробно не будем на этом останавливаться), что результат будет равен мгновенной частоте в момент, соответствующий середине интервала измерения, или, что то же самое, среднему арифметическому мгновенных частот на концах интервала измерения.
Смотрите далее пример простого частотомера с хорошими характеристиками:
Частотомер на основе микроконтроллера STM32 с конвейерным измерением частоты — 2 
Литература
Особенно хотелось бы отметить книгу "Сигналы, помехи, ошибки. ". Это замечательная книга, в которой хорошо раскрывается понятие мгновенной частоты; поясняется, в каких случаях уместно говорить о частоте сигнала, а когда следует переходить к рассмотрению спектра, а также подробно обсуждаются многие другие вопросы. Материал излагается довольно живо, доступно, но не упрощённо. И что приятно, книга не лишена тонкого ненавязчивого юмора.
В математических энциклопедиях можно найти определения базовых понятий (периодическая функция; почти периодическая функция; период; частота).
В энциклопедии по физике также можно найти аналогичные определения периодичности, периода, частоты и т.д.
Зависит ли от частоты качество и дальность связи?
Основным фактором, влияющим на дальность связи, является длина волны (или, иначе, частота) на которой ведется передача. Наверняка многие видели, как волны на поверхности воды легко перекатываются через прибрежные камни, но не могут обогнуть большую скалу – за скалой образуется своеобразная «тень», там волн практически нет. Для длинных радиоволн Земля – это небольшой камушек, и они сравнительно легко огибают земную поверхность. А вот для коротких и особенно ультракоротких радиоволн Земля слишком большое препятствие. Эти волны почти не огибают земной поверхности и практически не уходят за линию горизонта.
Влияние частоты сигнала на энергетику радиолинков в свободном пространстве
Что меняется при изменении применяемого диапазона частот в радиосвязи – не всегда корректно могут сформулировать даже опытные радиолюбители. С одной стороны формула передачи Фрииса крайне проста, и обсуждать, казалось бы, нечего. С другой стороны, в этой формуле кроме явного упоминания длины волны λ, она неявно скрыта в других коэффициентах. Есть много утверждений, заметок и статей, что с более высокими частотами энергетика радиолинков хуже, не меньше есть и статей «разоблачений мифа» — мол ничем высокие частоты не хуже, учите матчасть.
Оба утверждения верны, причем верно и третье – с повышением частоты энергетика линка может значительно улучшаться. Всё зависит от сценария применения (накладываемых ограничений).
Любая передача информации, не только с помощью радиоволн, а и любых других волн (звуковых, ЭМ волн более высоких частот – т.е. света, гравитационных волн) может происходить в 3 сценариях:
- Всенаправленное излучение и всенаправленный прием энергии.
- Направленное (секторное, узколучевое) излучение и всенаправленный прием
- Направленное излучение и направленный прием
В первом случае ни одна из сторон не знает местоположение в пространстве второй стороны, или не имеет средств наведения своих антенн на корреспондента.
К такому сценарию относятся практически все виды раций (военные, гражданские, авиационные), бытовые устройства (WiFi, Bluetooth, радиотелефоны, IoT, беспроводные сенсоры, телематика, брелки-отмычки), связь между спускаемым зондом и его космической станцией. Антенны обоих подвижных корреспондентов должны быть всенаправленными (изотропными) или близкими к ним.
Во втором случае, если одна из сторон стационарная и вероятное местоположение подвижного корреспондента ограничено некоторым сектором пространства – на стационарной стороне возможно применение направленной антенны, которая концентрирует энергию в избранном направлении, формируя луч (beam). Абонент подвижен, ни своего местоположения, ни положение базовой станции он не знает (или не имеет средств наведения антенн).
К такому сценарию относятся все виды обслуживания, когда стационарная базовая станция обслуживает подвижных абонентов (сотовая связь, репитеры для военных или гражданских раций, телерадиовещание на подвижных абонентов, спутниковая связь с подвижными абонентами, наземные станции космической связи обслуживающие высокоподвижные космические зонды). Антенна базовой станции имеет умеренную направленность и формирует луч для обслуживания желаемой зоны пространства. В идеале в любой точке зоны обслуживания на одинаковом расстоянии R от базы будет одинаковая плотность потока энергии Вт/м2. Антенна подвижного корреспондента должна быть всенаправленная (изотропная).
В третьем случае, если обе стороны знают о расположении другой стороны и имеют возможность направить туда свои антенны – можно существенно сэкономить энергию или увеличить скорость связи при тех же затратах энергии, за счет концентрации луча в пространстве.
К такому сценарию относятся все стационарные линии точка-точка: радиорелейные, WiFi точка-точка, радиолюбительская связь между 2 абонентами использующими направленные антенны; малоподвижные абоненты с возможностью точного позиционирования антенн на корреспондента (наземная станция космической связи и космическая станция с сервоприводами направленных антенн или двигателями позиционирования всей станции с жестко прикрепленной направленной антенной; перспективные модемы 5G mmWave или StarLink Илона Маска с автоматической настройкой луча активной фазированной решеткой АФАР; перспективные massive-MIMO модемы и базовые станции 4G/5G использующие большое количество антенн как АФАР)
Вернемся к формулам Фрииса

Здесь r (receiver) и t (transmitter) относятся к приемной и передающей антеннам, Pr/Pt – соотношение мощности на клеммах приемной антенны к мощности на передающей (больше – лучше), d – расстояние в тех же единицах измерения что и λ (например, в метрах)
Апертура антенны A (то же что «Эффективная/действующая площадь») связана с диаграммой направленности (ДН) антенны и её КНД (D = Directivity):

Для антенны в режиме приема эффективная площадь антенны (используется также термин эффективная поверхность антенны) характеризует способность антенны собирать (перехватывать) падающий на неё поток мощности электромагнитного излучения и преобразовывать этот поток мощности в мощность на нагрузке.
Независимо от типа и конструкции антенны, её апертура A и направленность D связаны математически через длину волны.
У всенаправленной (изотропной) антенны D=1 (0 dBi). Идеального изотропного излучателя на практике не существует, наиболее близким аналогом является обычный полуволновый диполь, у которого D
Сравним апертуру полуволнового диполя (или его аналога – четвертьволновый штырь с противовесом), у которого КНД = 2.15 dBi

Передающая антенна во всех диапазонах формирует одинаковую, близкую к сферической, диаграмму излучения. Плотность потока мощности Вт/м 2 от всех источников на одинаковом расстоянии R будет одинаковая.
Но поскольку апертура приемной (тоже всенаправленной) антенны отличается на порядки, то и количество собранной энергии из той же плотности потока будет сильно отличаться.
Возьмем некий абстрактный канал связи, в котором мощность передатчика TX=1W, а чувствительность приемника -101 dBm (2 мкВ при 50 Ом нагрузке). В открытом пространстве (препятствия, поглощения, отражения, помехи здесь не рассматриваем), дальность связи составит:

В открытом пространстве (пока дальность не ограничена видимостью), увеличение частоты в 2 раза увеличивает требования к мощности передатчика в 4 раза. При одинаковой мощности передатчика, увеличение частоты в 2 раза снижает дальность тоже в 2 раза.
Именно этот эффект является доминирующим для объяснения, почему:
- CDMA/LTE-450 дальнобойнее за GSM-900, который в свою очередь дальнобойнее за GSM-1800.
- WiFi-2400 дальнобойнее за WiFi-5400
- Рации 27-40 МГц дальнобойнее за 144-174, которые в свою очередь дальнобойнее за 433-470
В сценарии №2, если на одной стороне разрешено использовать малонаправленную (секторную) антенну ситуация точно такая же как и в сценарии №1, только мощность передатчика может быть уменьшена на усиление антенны базовой станции. Поскольку требуемый сектор обслуживания не зависит от частоты, то направленность антенны БС нужна одинаковая (апертура антенны БС при этом конечно будет разной на разных диапазонах). При направленности БС 12 dBi (на 10 dB или в 10 раз больше чем у диполя 2 dBi) – выигрыш в мощности составит 10 dB (10 раз), дальность связи на мобильного абонента может быть такая же, как в предыдущей таблице, но уже при TX=0.1W. Для 5400 МГц она опять составит 25.7 км, а для 27 МГц – 5142 км.
В сценарии №3 возможны очень различные комбинации решений.
Если отбросить конструктивные ограничения и сложности, то при равной площади (апертуре) обоих антенн направленность обоих антенн Dr и Dt пропорциональна квадрату частоты. Поэтому эффективность приемной антенны останется неизменной (из одного и того же потока плотности Вт/м 2 будет извлечена одинаковая мощность на клеммах, независимо от частоты), а направленность передающей антенны увеличится пропорционально квадрату частоты. При увеличении частоты в 2 раза, луч станет тоньше в 4 раза, плотность потока Вт/м 2 в направлении на абонента увеличится в 4 раза.
При равных ограничениях на габариты/вес антенн, более высокие частоты более выгодны энергетически.
На практике же реализовать такое фундаментальное преимущество не так просто.
К антеннам с фиксированной частотно-независимой апертурой относятся только зеркальные параболические антенны. Количество энергии, которое собирает такое зеркало, не зависит от частоты, а луч диаграммы направленности становится более тонким с ростом частоты.
Но сложность в производстве параболической антенны заданного диаметра зависит не только от диаметра. Чем более высокая частота, тем более высокие требования к точности поверхности зеркала и более высокие требования к точности позиционирования и вообще жесткости всей конструкции.
С другими, незеркальными антеннами, ситуация намного сложнее. Все конструкции таких антенн могут быть описаны в частотно-независимых размерах (в лямбдах) и имеют фиксированную диаграмму направленности, присущую этому типу антенн, которая не зависит от выбранной частоты проектирования. Иными словами, например 7-элементная антенна волновой канал (Уда-Яги) будет иметь одинаковую диаграмму направленности и усиление
10 dBi независимо на какую частоту её рассчитать: на 30 МГц или на 3000 МГц. Во втором случае её апертура будет в 10 000 раз меньше. Просто так, взять и увеличить размеры какого-то типа антенн чтобы увеличить апертуру – нельзя. Добавление каких-либо пассивных (паразитных) структур добавляет направленности очень незначительно (по сравнению с ростом габаритов) и лишь до небольших значений порядка 16 dBi (40 раз).
Дальнейшее повышение апертуры, которое соответствует направленности более 16 dBi на практике возможно только соединением многих антенн в ФАР (фазированную антенную решетку). Теоретически удвоение количества элементов в решетке может увеличивать апертуру в 2 раза, т.е. формировать в 2 раза более тонкий луч с усилением +3 dB. Но практически построение таких ФАР сопряжено с большими трудностями: сигнал от единого источника надо согласованными (по волновому сопротивлению) волноводами синфазно доставить к каждому из N элементов решетки.
Для небольшого количества элементов, например 2х2, 2х4, 3х3 такая задача решаема, а для бОльшего количества элементов она настолько сложна, что всегда проигрывает зеркальным параболическим антеннам, с помощью которых легко создается направленность 20-40 dBi, а в больших проектах (как наземные станции дальней космической связи) достигает 70 dBi (усиление параболической антенны диаметром 70 метров на частоте 5885 МГц).
Для примера рассчитаем дальность связи линии «точка-точка» с TX=1W, чувствительностью -101 dBm с парой параболических антенн диаметром D=1 метр и эффективностью использования апертуры k=60% (типичное значение для современных облучателей зеркала)
Для расчета КНД параболического зеркала воспользуемся формулой:


Увеличение частоты в 2 раза увеличивает дальность в 2 раза или позволяет применить на одной из сторон антенну с диаметром апертуры меньше в 2 раза, или с каждой стороны уменьшить диаметр антенны в SQRT(2)
Требования к точности наведения луча (юстировки антенны на абонента) тоже растут пропорционально квадрату частоты.
В этой статье мы НЕ рассматриваем вообще другие вопросы, такие как отражение, дифракция, рефракция, поглощение в газах, препятствиях, атмосфере, ионосфере, шумовая и помеховая обстановка
Выводы
Повышение частоты радиосвязи может давать как преимущества так и недостатки в зависимости от сценария применения (техзадания).
В условиях подвижной безподстроечной связи низкие частоты более выгодны, т.к. апертура всенаправленной антенны пропорциональна квадрату длины волны. Увеличение длины волны в 2 раза увеличивает апертуру антенны в 4 раза. Это дает возможность или увеличить дальность в 2 раза (в условиях видимости и ограничения дальности связи по энергетическому бюджету) или снизить мощность передатчика в 4 раза при прочих равных.
По этой причине военные ранцевые, автомобильные и танковые рации продолжают проектироваться на самый низ диапазона УКВ – от 27 до 50 МГц, в то время как гражданская и коммерческая связь неумолимо осваивает всё более высокие частоты.
Полуволновый диполь (или четвертьволновый штырь с противовесом) на низких частотах более крупные, что является с одной стороны недостатком. С другой стороны именно этот недостаток и позволяет собирать из пространства больше энергии.
В условиях линий точка-точка низкие частоты тоже более выгодны во всех случаях, кроме применения параболических антенн с фиксированной апертурой. Для антенн с одинаковой направленностью апертура убывает пропорционально квадрату роста частоты. При росте частоты в 2 раза, размеры антенны того же типа уменьшаются в 2 раза (в каждом измерении, т.е. объем уменьшается в 8 раз), но расплатой за этой является снижение в 4 раза апертуры такой антенны.
А вот в линиях «точка-точка» с параболическими антеннами – наоборот переход на более высокие частоты позволяет при тех же диаметрах зеркала улучшать энергетический бюджет в 4 раза при росте частоты в 2 раза. Повышение частоты в 2 раза позволяет:
- при прочих равных увеличить дальность в условиях видимости в 2 раза
- при той же дальности уменьшить мощность излучения в 4 раза
- при прочих равных увеличить в 4 раза скорость линии
Расплатой за такое повышение являются повышенные требования к прецизионности изготовления, как самой антенны, так и механизма наведения (юстировки) на абонента.
Почему мы используем разные диапазоны частот. Часть 1
С момента появления первого радио человечество шагнуло далеко вперед. Изучение радиоволны как явления не стояло и не стоит на месте, способы донести необходимую информацию до человека на другой стороне постоянно развиваются.
В частности одно из важнейших открытий в этой области состояло в том, что было выявлено: радиоволна ведет себя по разному в зависимости от своей длины.
Из курса физики нам известно, что длина радиоволны — величина обратно пропорциональная частоте радиовещания.

В чем же разница в "поведении" у радиоволн разных диапазонов? Как правило основными различиями являются:
1. Различные скорости передачи информации. У более высоких частот скорость передачи выше, чем у более низких;
2. Различная дальность и характер распространения радиоволн различных диапазонов;
3. Различные длины антенн, необходимые для передачи радиоволн того или иного диапазонов.
Сегодня рассмотрим радиоволны сверхдлинного диапазона (СДВ).
Для радиоволн СДВ-диапазона характерны следующие особенности:
1. Крайне низкая скорость передачи информации;
2. Возможность вести передачу сразу на территорию всего земного шара;
3. Необходимость установки антенны длинной в несколько километров.
Почему информация на данных частотах передается медленно? Все дело в так называемой информационной скорости, которая, если сильно упростить, по большей части зависит от величины частоты передачи, т.е. чем меньше частота, тем ниже скорость, а мы сейчас рассматриваем самый низкочастотный диапазон.
Тут стоит сделать отступление и внести ясность: информация в подавляющем большинстве случаев не передается на определенной конкретной частоте. Передача происходит в выделенной полосе частот. Тут прямая аналогия с человеческой речью. Если провести аналогию между радиоволной и звуковой волной. Когда мы произносим звук "а", мы создаем волну определенной длины, а когда звук "и" — другой. Чем больше символов мы хотим использовать при передаче, тем больше частот мы должны использовать. В радиоволнах производится бинарная передача, т.е. передача нулей и единиц, однако для увеличения скорости мы можем передавать их комбинации, например 00, 01, 10, 11 — четыре частоты (есть конечно и другие механизмы увеличения скорости передачи: применение различных видов модуляции, кодирования, различных стандартов сигналов и прочие, но мы упростим). Т.е. увеличение занимаемой сигналом полосы частот экспоненциально увеличивает скорость передачи.
Здесь мы не будем рассматривать такие механизмы как мультиплексирование, турбокодирование и прочие страшные слова, позволяющие так же увеличить скорость передачи. Я стараюсь донести информацию до людей, совершенно несведущих в данном аспекте. Для гуру электродинамики данная информация очевидна и, возможно, даже кажется бредом, но я стараюсь приводить банальные примеры, так сказать объясняю на пальцах.
Вернёмся к делу. Конечно существуют механизмы передачи на одной конкретной частоте, например сигналы с так называемой амплитудной модуляцией. Они передаются с использованием различных мощностей. Например: большая мощность передачи — это передается "1", сигнал стал слабее — передача "0".
Но вернёмся к нашим баранам. Чтобы передать голосовое сообщение необходимо использовать полосу частот, шириной минимум 300 кГц. Наилучшее качество речи достигается при ширине 3400 кГц.
При этом СДВ диапазон занимает всего полосу от 3 до 30 кГц. Естественно, что о передачи речи в данном диапазоне не может быть и речи.
СДВ диапазон используется и использовался исключительно для служебной связи. Оно и понятно, не каждый радиолюбитель может установить у себя во дворе антенну длинной в нескольких ко километров (в горизонтали), чтобы вещать свою волю на весь мир.
В данный момент СДВ диапазон используется военными РФ и США для осуществления связи с подводными лодками. СДВ диапазон — единственный диапазон волн, способный проникать под толщу воды и делает это на глубину до 20 м. США используют для этих целей самолеты E-6 Mercury, которые, находясь в воздухе, разворачивают из своей хвостовой части антенну СДВ-диапазона (самолет оборудован двумя антеннами — основная длинной почти 8 км и запасная — чуть более 1 км.


Самолет Boeing E-6 Mercury. На нижнем фото виден красный наконечник основной антенны самолета E-6B, который позволяет антенне "вытянуться" и находиться в положении, близкому к горизонтальному, когда самолет находится в воздухе.
Передача одного буквенного символа может занимать несколько минут, поэтому сеанс связи с лодкой может длиться несколько часов и производится только в одну сторону. Подлодки ничего не отвечают, потому что не обладают передающими антеннами, плюсом может так же выступать сокрытие собственного местоположения. А, поскольку, данная система используется для связи только со стратегическими ядерными силами — оно и понятно, насколько важно сокрыть местоположение своих ядерных ракет в море.
До появления спутников — СДВ диапазон использовали ВС США для создания системы глобальной навигации "Омега". Американцы установили 8 станций-передатчиков по всему миру, приемник, установленный на борту самолета или корабля принимал сигналы от них, определял направление на источник каждого из них и таким образом определял собственное местоположение. Погрешность составляла всего 4 мили, что является достаточно неплохим показателем для волн данной длины.
Радиоволна СДВ диапазона способна обогнуть весь земной шар столько раз, насколько хватит ее мощности. Ввиду этого необходимо принимать меры для защиты от интерференции, которая возникает, когда радиоволна как бы "догоняет" новоформируемую и на приемник поступает и "новая" и "старая" волна одновременно.
Но как же волна огибает земную поверхность? Для понимания нам необходимо будет ввести два понятия. Земная волна — волна распространяемая вдоль земной поверхности. Ионосферная волна — волна, которая распространяется путем многократного отражения от земной поверхности и ионосферы.
Для волн СДВ диапазона характерно наличие обоих видов волн.
Когда мы рассматриваем земную волну СДВ, то говорим о явлении дифракции, т.е. способностью волны огибать препятствия на своем пути. А, поскольку препятствием в данном случае является само искривление земной поверхности, то мы и получаем, что волна как бы огибает землю, следуя за земной корой до тех пор, пока энергетика ее не иссякнет.
Когда же мы говорим об ионосферных волнах, то надо представить луч света, попадающий меж двух зеркал. Так и волна СДВ диапазона в данном случае — сначала отражается от ионосферы, затем двигается по направлению к поверхности земли, отражается уже от нее, вновь движется вверх, вновь отражается от ионосферы и т.д.
Нетрудно понять, что волна, распространяющаяся земной волной прибудет до получателя быстрее, чем волна, распространяющаяся ионосферной. Таким образом если мы будем получателем, то мы сначала примем земную волну, затем некоторое время мы будем принимать своеобразное "эхо" от ионосфорной волны, затем "эхо" земной волны, которая уже обогнула Землю и вновь пришла к нам, а потом еще и "эхо" ионосферной волны, также обогнувшей Землю. И не факт, что это произойдет один, а не два или три а то и больше раз. Для решения данной проблемы и ликвидации "эха" применяется уже специальное оборудование, но о нем мы говорить не будем.
Уже было много сказано про жесткие требования к длине передающей антенны, но как обстоят дела с принимающей? Там все намного более щадяще: при наличии хороших усилителей, габариты антенны могут не превышать пары десятков сантиметров, что позволяет устанавливать принимающую СДВ аппаратуру на различные транспортные средства в т.ч. — самолеты.
На этом у меня всё — гуру электродинамики могут восполнить эту информацию или указать на неточности в комментариях, но, как я уже говорил — я старался для людей, максимально далеких от радио в целом.
Хороших вам выходных и изучайте окружающий вас мир, ему есть чем вас удивить.

7.2K постов 77K подписчиков
Правила сообщества
Основные условия публикации
— Посты должны иметь отношение к науке, актуальным открытиям или жизни научного сообщества и содержать ссылки на авторитетный источник.
— Посты должны по возможности избегать кликбейта и броских фраз, вводящих в заблуждение.
— Научные статьи должны сопровождаться описанием исследования, доступным на популярном уровне. Слишком профессиональный материал может быть отклонён.
— Видеоматериалы должны иметь описание.
— Названия должны отражать суть исследования.
— Если пост содержит материал, оригинал которого написан или снят на иностранном языке, русская версия должна содержать все основные положения.
Не принимаются к публикации
— Точные или урезанные копии журнальных и газетных статей. Посты о последних достижениях науки должны содержать ваш разъясняющий комментарий или представлять обзоры нескольких статей.
— Юмористические посты, представляющие также точные и урезанные копии из популярных источников, цитаты сборников. Научный юмор приветствуется, но должен публиковаться большими порциями, а не набивать рейтинг единичными цитатами огромного сборника.
— Посты с вопросами околонаучного, но базового уровня, просьбы о помощи в решении задач и проведении исследований отправляются в общую ленту. По возможности модерация сообщества даст свой ответ.
Наказывается баном
— Оскорбления, выраженные лично пользователю или категории пользователей.
— Попытки использовать сообщество для рекламы.
— Многократные попытки публикации материалов, не удовлетворяющих правилам.
— Нарушение правил сайта в целом.
Окончательное решение по соответствию поста или комментария правилам принимается модерацией сообщества. Просьбы о разбане и жалобы на модерацию принимает администратор сообщества. Жалобы на администратора принимает @SupportComunity и общество Пикабу.
Небольшая очепятка: не 3400 кГц, а 3400 Гц.
Так, падажжи, 30кГц это же всё равно до
30 килобит в секунду в идеальных условиях? с помехами, шифрованием, избыточным кодированием и всей фигнёй допустим 3 килобита, это всё равно до 384 8-битных символов в минуту должно быть? Чтобы скорость была «печатный символ в несколько минут», частота должна быть несколько герц.

Ил-96-400Т снова в воздухе
Ил-96-400Т (один из самых красивых отечественных самолётов) RA-96103 снова в воздухе — через 8 лет хранения на земле на воронежском авиазаводе.

Работы по восстановлению лётной годности самолёта подошли к концу и лайнер приступил к лётным испытаниям: 19 августа Ил-96-400Т совершил испытательный полет на территории ВАСО в Воронеже, а вчера (21 августа) перелетел в Ульяновск на перекраску.

Борт окрашен в ливрею AirBridgeCargo, куда планировался к передаче, однако что-то пошло не так и стало известно, что теперь он будет выполнять полёты под флагом авиакомпании Sky Gates, недавно выкупленной компанией Red Wings (принадлежит ОАК).

Самолёт был построен по заказу авиакомпании «Полёт» и принадлежал лизинговой компании «Ильюшин Финанс Ко». Борт носил имя Вячеслава Саликова — директора ВАСО с 1998 г., трагически погибшего в автокатастрофе в 2008 году.

Первый полёт состоялся в сентябре 2009 года, в том же году был передан эксплуатанту, летал до 2013 года. После краха «Полёта» самолёт находился на хранении в Воронеже.

Шелковые шарфы летчиков

Почему шелковые шарфы были обязательным элементом экипировки летчиков?
Казалось бы, чего тут проще! На заре авиации пилот самолета был одной из самых романтичных профессий. Белый шелковый шарф как нельзя кстати дополнял этот образ. Посмотрите как он гармонично смотрится на фото. Вот вам и объяснение же!
Но оказывается не все так просто.

Первая мировая война стала первым серьезным военным конфликтом, в котором была задействована боевая авиация. В то время ВВС во всех странах находились в зачаточном положении, и многие вещи все еще не были доведены в лётном деле не что до совершенства, а хотя бы до ума. Ярким примером тому была летная экипировка, которую пришлось неоднократно дорабатывать. Что интересно, инициатива в то время часто исходила снизу.

Кабины первых самолетов не имели полного остекления. Не существовало и летных скафандров, которые бы брали на себя роль системы жизнеобеспечения летчика. Тем не менее, даже на не очень большой высоте становилось очень холодно. Вопрос решался доступными для начала XX века способами. Летчики надевали теплую одежду, утепленные шлемофоны, очки для защиты глаз от ветра, а также кожаные куртки или плащи с воротником, которые должны были защищать тело и руки от порывов холодного ветра.

Проблема заключалась лишь в том, что одежда с высоким воротником оказалась крайне непрактичной для воздушного боя. Так как какие-либо высокотехнологичные средства обнаружения в то время отсутствовали, летчики могли полагаться только на визуальное наблюдение за землей и противником в небе. Приходилось очень много крутить головой. Так много, что не спасал даже пришивной подворотничок. Буквально за один вылет пилот мог стереть шею в кровь.

Тогда-то французские летчики первым и додумались до шелковых шарфов. Пилоты просто стали вырезать шарфы из запасов парашютной ткани. А делали парашюты в то время как раз из шелка. В итоге получилось не только утилитарное средство защиты шеи, но и модный аксессуар. Командование быстро одобрило инициативу офицеров и вскоре шелковый шарф стал во многих подразделениях обязательным предметом экипировки. А уже после Первой мировой войны белый шарфик стал еще и одним из символов летчиков.

Ко Второй мировой войне с развитием профессионального снаряжения о летных шарфах стали постепенно забывать. Хотя они все еще использовались в ряде частей и подразделений, в том числе в Советском Союзе. Сегодня в эпоху гермокостюмов из современных материалов необходимости в шарфах нет. Тем не менее, в ряде стран они являются элементом традиционного и парадного гардероба летчиков ВВС. Например, в Швеции шелковые шарфы разного цвета означают принадлежность летчиков к разным эскадрильям.

В заключение стоит отметить, что на просторах интернета также бытует миф о том, что шелковые шарфы якобы использовались для определения скорости самолета в силу того, что у машин времен Первой мировой войны отсутствовал кокпит. Подобные утверждения несостоятельны. Оборудование было куда скромнее, даже чем в машинах Второй мировой войны, но датчики скорости и давления уже существовали. Достаточно взглянуть на фото кабины самолета начала XX века.

Правда ли, что в самолёте томатный сок кажется вкуснее, чем на земле?

Бытует мнение, что во время полёта в самолёте томатный сок приобретает более выраженный вкус, поэтому на борту люди пьют его чаще, чем в обычной жизни. Мы решили проверить, подтверждают ли это научные данные.
Спойлер для ЛЛ: из-за изменения в восприятии отдельных вкусов при пониженном давлении, а также психологических факторов, вкус томатного сока в самолете действительно может казаться более насыщенным и ярким .
Об исключительной популярности томатного сока на коммерческих авиарейсах пишут многочисленные СМИ, любовь пассажиров к нему обсуждают на сайтах о путешествиях и туризме, а также на гастрономических ресурсах. Бортпроводники также рассказывают о востребованности этого напитка среди пассажиров. Стюардесса авиакомпании S7 Юлия Михеева в интервью The Village сообщает, что «томатный сок заказывают, наверное, процентов на 30 чаще, чем другие соки, и он быстрее всего заканчивается. Поэтому и на борт его загружают больше: иногда на каждые десять упаковок яблочного и апельсинового берём 15 томатного». Однако, отмечает бортпроводница, вряд ли любовь к томатному соку можно считать абсолютной: «При полётах на восток пассажиры предпочитают яблочный и апельсиновый соки. С чем это связано, не могу объяснить. В Европу, на запад, по России — в лидерах томатный». Популярность томатного сока как важной части бортового меню подтверждается скандалом, разгоревшимся в 2018 году — американская авиакомпания United Airlines решила убрать напиток из меню, и это вызвало негодование пассажиров. В итоге томатный сок в меню пришлось оставить.
До 1920-х годов томатный сок не был популярен — не существовало технологии его промышленного производства и широкого рынка сбыта. По словам историка кулинарии и исследователя продуктов питания в Университете Новой школы в Нью-Йорке Эндрю Смита, история его появления такова. Два брата из Индианы пересобрали машину для приготовления мороженого так, чтобы с помощью неё извлекать из мякоти томатов густой и насыщенный по вкусу сок. Инновация понравилась Heinz и Campbell Soup, они запустили первую промышленную линию по производству напитка. В конце эпохи сухого закона томатный сок стал неотъемлемым ингредиентом популярного коктейля «Кровавая Мэри». В 1930-е годы Амелия Эрхарт, американская пионерка авиации и первая женщина, перелетевшая Атлантический океан, в радиоинтервью заявила, что томатный сок — это её любимый напиток в полётах, который к тому же в этих условиях заменяет ей еду.
Немецкая авиакомпания Lufthansa в 2010 году отметила, что за год её пассажиры выпили 53 000 галлонов (чуть больше 200 000 л) томатного сока, более популярным напитком на борту было только пиво — его расход за год составил 59 000 галлонов (223 000 л). Такое наблюдение подтолкнуло авиакомпанию к идее провести исследование, чтобы понять, почему томатный сок так привлекателен для пассажиров. В качестве экспертов привлекли учёных из Общества содействия прикладным исследованиям имени Фраунгофера, крупнейшего европейского объединения институтов прикладных исследований. Фюзеляж списанного самолёта Airbus A310-200 стал основой авиасимулятора: учёные заклеили иллюминаторы картинками, схожими с теми, что видит пассажир в полёте, поставили динамики, воспроизводящие шум самолёта, установили специальные устройства, чтобы кресло тряслось, имитируя полёт, а также создали такое же давление, влажность и температуру воздуха, которая характерна для полёта в пассажирском самолёте. В этот салон пригласили добровольцев, которым предлагали различные варианты бортового питания. Восприятие кислого вкуса «на высоте» не изменилось, а вот сладкий и солёный вкус потеряли около 20% своей интенсивности. Доктор Андреа Бурдак-Фрейтаг сравнивает восприятие вкусов в самолёте с теми ощущениями, которые мы испытываем во время простуды. Она поясняет: «При нормальном давлении вкус томатного сока ощущается как земляной и затхлый, а при пониженном давлении в салоне добровольцы описывают его как более приятный, фруктовый по своему аромату с выраженным сладким и освежающим вкусом».
Полученные в эксперименте данные хорошо согласуются с более ранними исследованиями. В 1997 году учёные из Института физиологии и смежных наук в Дели отправили группу добровольцев на три недели жить на высоту в 3500 м. Им предлагали пить растворы, для придания которым того или иного вкуса исследователи добавили в жидкость глюкозу (отвечала за сладкий вкус), хлорид натрия (солёный), сульфат хинина (горький) или лимонную кислоту (кислый). Находясь в высокогорных районах, участники эксперимента отметили, что сладкий и солёный вкус воспринимались как менее интенсивные, то есть нужна было более высокая концентрация вещества в водном растворе, чтобы испытуемый мог определить, какая добавка в нём присутствует. При этом восприятие горького и кислого у добровольцев не изменилось. После их возвращения на высоту уровня моря восприятие вкусов вернулось к привычному. Томатным соком эту группу в эксперименте не поили, но можно предположить, что и он на высоте изменил бы свой вкус.
В 2015 году изменением восприятия различных вкусов под воздействием внешних обстоятельств заинтересовались учёные из Корнелльского университета (США). Кимберли Ян и Робин Дандо изучали влияние шума до 85 дБ — добровольцы пробовали разную еду, а в это время в надетых на них наушниках звучал шум разной громкости. Восприятие солёных, кислых и горьких вкусов при громком шуме не изменялось, сладкие вкусы чувствовались как менее интенсивные, то есть требовалась большая концентрация сахара, чтобы участник эксперимента определил продукт как сладкий, а про вкус умами добровольцы сообщили, что он кажется им на 20% более выраженным. Умами, иначе называемый мясным, — пятый вкус, описанный в 1909 году японским химиком Кикунаэ Икэдой. Мы чувствуем его из-за содержащейся в пище глутаминовой кислоты и некоторых рибонуклеотидов. Наиболее выражен он в мясе, некоторых видах рыбы и морепродуктов, водорослях, шпинате, сырах, грибах и томатах. Таким образом, при громком шуме томатный сок имеет более выраженный и яркий вкус, чем если пить его в тишине.
Также учёные предполагают, что люди отдают предпочтение томатному соку в самолёте не только из-за изменения физических условий, но и вследствие психологии. Чарльз Спенс, профессор экспериментальной психологии из Оксфордского университета, также заинтересовался изучением того, что люди потребляют в воздухе и как они воспринимают там «земные» вкусы. Он отмечает, что в самолёте на нас, помимо давления и шума, влияют психологические факторы: в частности, стресс, связанный с перелётом, нарушение циркадных ритмов при пересечении большого количества часовых поясов, ограниченность выбора в меню и даже то, что соседи-пассажиры озвучивают свой выбор перед нами. Директор отдела питания пассажиров авиакомпании Lufthansa Эрнст Деренталь делится таким наблюдением, раскрывающим мысль психолога: «Многим людям тяжело даётся принятие решений. Они понимают, что с минуты на минуту стюардесса спросит их, какой напиток они бы хотели, и теряются. В этот момент они замечают именно томатный сок у джентльмена в соседнем ряду и на автомате выбирают его же». Деренталь также добавляет, что, по его данным, некоторым пассажирам именно вкус томатного сока помогает справляться с тошнотой во время полёта, другие же выбирают его, потому что он притупляет чувство голода. Колумнист The Guardian Сэм Вольфсон предполагает, что работает не только физиология, но и ритуалы некоторых пассажиров — он сравнивает выбор именно томатного сока в самолёте с традицией есть попкорн в кинотеатре или хот-доги на бейсбольном матче.
Таким образом, научные исследования показывают, что при повышенном уровне шума и на большой высоте, то есть при пониженном давлении, восприятие отдельных вкусов действительно изменяется: сладкий и солёный ощущаются как менее интенсивные, умами — более, а горький и кислый остаются неизменными. При этом сам томатный сок, насыщенный вкусом умами, исследователи почти не тестировали, хотя, предположительно, такое изменение в восприятии должно было касаться и его. Психологи также отмечают, что употребление томатного сока в самолёте для ряда пассажиров приобретает черты ритуала, поэтому выбирать его чаще других люди могут не только из-за субъективных ощущений вкуса, а потому что так принято.