16.3. Основные режимы работы электроприводов
Д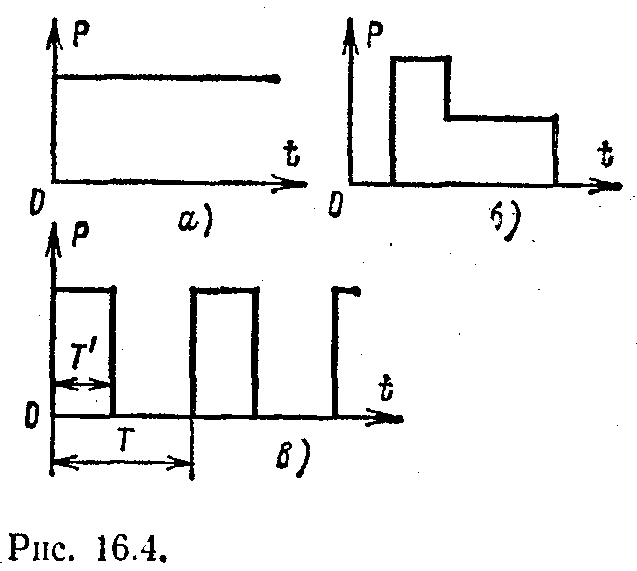 лительность работы и ее характер определяют рабочий режим привода. Для электропривода принято различать три основных режима работы: продолжительный, кратковременный и повторно-кратковременный.
лительность работы и ее характер определяют рабочий режим привода. Для электропривода принято различать три основных режима работы: продолжительный, кратковременный и повторно-кратковременный.
Продолжительный режим (согласно ГОСТ 183-74) — это режим работы такой длительности, при которой за время работы двигателя температура всех устройств электропривода достигает установившегося значения (рис. 16.4, а).
В качестве примеров механизмов с длительным режимом работы можно назвать центробежные насосы насосных станций, вентиляторы, компрессоры, конвейеры непрерывного транспорта, дымососы, бумагоделательные машины, машины для отделки тканей и т. д.
При кратковременном режиме рабочий период относительно краток (рис. 16.4, б) и температура двигателя не успевает достигнуть установившегося значения. Перерыв же в работе исполнительного механизма достаточно велик для того, чтобы двигатель успевал охладиться практически до температуры окружающей среды. Такой режим работы характерен для самых различных механизмов кратковременного действия: шлюзов, разводных мостов, подъемных шасси самолетов и многих других.
При повторно-кратковременном режиме (рис. 16.4, в) периоды работы чередуются с паузами (остановка или холостой ход), причем ни в один из периодов работы температура двигателя не достигает установившегося значения, а во время снятия нагрузки двигатель не успевает охладиться до температуры окружающей среды.
Характерной величиной для повторно-кратковременного режима является отношение рабочей части периода Т’ ко всему периоду Т. Эта величина именуется относительной продолжительностью работы (ПР %) или относительной продолжительностью включения (ПВ %). Примерами механизмов с повторно-кратковременным режимом работы могут служить краны, ряд металлургических станков, прокатные станы, буровые станки в нефтяной промышленности и т. д.
В соответствии с основными видами режимов работы электропривода различно определяется и номинальная мощность электродвигателя. Условия нагревания и охлаждения двигателя при повторно-кратковременном режиме существенно отличаются от условий работы в продолжительном режиме.
Например, условия охлаждения обмотки возбуждения двигателя постоянного тока параллельного возбуждения практически остаются неизменными и при остановке двигателя, а условия охлаждения якоря при остановке сильно ухудшаются. По этой причине двигатель постоянного тока, рассчитанный для продолжительного режима на неизменные условия охлаждения, при повторно-кратковременном режиме будет использоваться нерационально; при предельно допустимом нагреве обмотки якоря и коллектора обмотка возбуждения будет нагреваться значительно ниже допустимой температуры.
Следовательно, целесообразно для повторно-кратковременного режима изготовлять двигатели специальных типов. Руководствуясь этим, электротехническая промышленность изготовляет крановые электродвигатели, рассчитанные на три различных номинальных режима: продолжительный, кратковременный и повторно-кратковременный. Соответствующее указание делается на табличке электродвигателя; под его номинальной мощностью следует понимать полезную механическую мощность на валу в течение времени, соответствующего его номинальному режиму, т. е. продолжительно, кратковременно или же повторно-кратковременно при определенной продолжительности включения.
В течение весьма короткого промежутка времени двигатель может развивать мощность значительно большую, чем номинальная. Мгновенная перегрузочная мощность двигателя — это наибольшая мощность на валу в течение весьма малого промежутка времени, развиваемая двигателем без каких-либо повреждений. Такая мощность определяется в большинстве случаев электрическими свойствами двигателя (максимальным моментом у асинхронных двигателей или условиями коммутации у двигателей постоянного тока), а иногда и механической конструкцией двигателя. Мгновенные перегрузочные свойства электродвигателя обычно характеризуются коэффициентом перегрузки по моменту λмом, т. е. отношением максимального кратковременно допустимого перегрузочного момента к номинальному: λиоы = Mmax/Мном. Для большинства электродвигателей λмом ≈ 2 (у специальных электродвигателей λ.мом = 3 ÷ 4).
Часто по условиям работы привода важна перегружаемость электродвигателя не мгновенная, а на определенный, относительно короткий промежуток времени. В соответствии с этим требованием указывается кратковременная перегрузочная мощность двигателя (временная мощность) — мощность, развиваемая двигателем в течение определенного ограниченного промежутка времени (5, 10, 15, 30 мин и т. д.), после чего двигатель должен быть отключен на столько времени, чтобы он успел охладиться до температуры окружающей среды. Для одного и того же двигателя соотношения между его продолжительной, перегрузочной и кратковременной перегрузочной мощностями зависят от электрической характеристики и конструкции двигателя.
РЕЖИМЫ РАБОТЫ ЭЛЕКТРОПРИВОДА
Все режимы в электроприводе делятся на установившиеся (номинальный режим работы) и переходные (пуск, реверс, торможение).
Установившийся режим работы электропривода определяется из условия равенства нулю динамического момента. Этот режим характеризуется работой двигателя с неизменной угловой скоростью, постоянными во времени и равными по величине моментом двигателя и моментом сопротивления. Так как момент, развиваемый двигателем в установившемся режиме, есть функция скорости, то равенство М=Мс возможно только при условии, что момент сопротивления — постоянная величина или функция скорости. Если МС есть функция, например, пути (угла поворота), то даже при постоянной угловой скорости момент сопротивления изменяется во времени и установившийся режим невозможен.
Установившийся режим описывается статическими характеристиками.
Переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток.
Причинами возникновения переходных режимов в электроприводах является либо изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т. е. пуск, торможение, изменение направления вращения и т. п. Переходные режимы в электроприводах могут возникнуть также в результате аварий или нарушения нормальных условий электроснабжения (например, изменения напряжения или частоты сети, несимметрия напряжения и т. п.).
Характер переходного режима электропривода зависит от свойств рабочей машины, типа примененного двигателя и механической передачи, принципа действия и свойств аппаратуры управления, а также от режима работы двигателя (пуск, торможение, прием и сброс нагрузки и т. д.).
Переходные режимы описываются динамическими характеристиками.
УравнениЕ движения электропривода
Электродвигатели, преобразующие электрическую энергию в механическую, создают вращательное движение; значительная часть машин-орудий также имеет вращающиеся рабочие органы; поэтому представляется целесообразным вывод уравнения движения сделать сначала для случая вращательного движения.
В соответствии с основным законом динамики для вращающегося тела векторная сумма моментов, действующих относительно оси вращения, равна производной момента количества движения:

В системах электропривода основным режимом работы электрической машины является двигательный. При этом момент сопротивления имеет тормозящий характер по отношению к движению ротора и действует навстречу моменту двигателя. Поэтому положительное направление момента сопротивления принимают противоположным положительному направлению момента двигателя, в результате чего уравнение (4.1) записывается в виде:


Уравнение движения привода (4.2) показывает, что развиваемый двигателем вращающий момент уравновешивается моментом сопротивления на его валу и инерционным или динамическим моментом . В этом уравнении принято, что момент инерции привода является постоянным, что справедливо для значительного числа производственных механизмов. Здесь моменты являются алгебраическими, а не векторными величинами, поскольку оба момента и действуют относительно одной и той же оси вращения.

Правую часть уравнения (4-2) называют инерционным (динамическим) моментом (), т.е.

Этот момент проявляется только во время переходных режимов, когда изменяется скорость привода. Из (4.3) следует, что направление динамического момента всегда совпадает с направлением ускорения электропривода.
В зависимости от знака динамического момента различают следующие режимы работы электропривода:
1) , т.е. , имеет место ускорение привода при , и торможение привода при .

2) , т.е. , имеет место замедление привода при , и ускорение при .





3) , т.е. , в данном случае привод работает в установившемся режиме, т.е. .
В общем виде уравнение движения привода может быть записано следующим образом:

Выбор знаков перед значениями моментов зависит от режима работы двигателя и характера моментов сопротивления.
Наряду с системами, имеющими только элементы, находящиеся во вращательном движении, иногда приходится встречаться с системами, движущимися поступательно. В этом случае вместо уравнения моментов необходимо рассматривать уравнение сил, действующих на систему.

При поступательном движении движущая сила всегда уравновешивается силой сопротивления машины и инерционной силой , возникающей при изменениях скорости. Если масса тела выражена в килограммах, а скорость — в метрах в секунду, то сила инерции, как и другие силы, действующие в рабочей машине, измеряются в ньютонах ().
В соответствии с изложенным уравнение равновесия сил при поступательном движении записывается так:

В (4.4) принято, что масса тела является постоянной, что справедливо для значительного числа производственных механизмов.
Сказанное выше о классификации и знаках моментов полностью справедливо и для сил, действующих на систему.
5 Влияние параметров , , на вид скоростных (механических) характеристик двигателя постоянного тока с параллельным возбуждением. Регулирование скорости вращения двигателя
Регулированием скорости называется целенаправленное принудительное изменение скорости двигателя посредством специального устройства или приспособления, независимо от величины и характера нагрузки, в соответствии с требованиями, предъявляемыми к закону движения рабочего органа механизма. Установленная при регулировании скорость при отсутствии воздействия на регулирующее приспособление в дальнейшем изменяется по механической характеристике электропривода в соответствии с нагрузкой. Регулирование скорости позволяет наиболее рационально использовать производственные механизмы, обеспечить оптимальные режимы их работы и, как правило, уменьшить расход энергии.
Двигатели параллельного возбуждения, питаемые от источника постоянного напряжения, применяются обычно для длительного режима работы, когда требуется широкое регулирование частоты вращения, например для металлообрабатывающих станков, для листоправильных машин в прокатных станах, для главных приводов трубопрокатных станов и т. п.
Выражение скорости вращения двигателя постоянного тока:

показывает, что возможны три принципиально различных способа регулирования угловой скорости двигателя:
1) изменением тока возбуждения (магнитного потока) двигателя;
2) изменением сопротивления цепи якоря посредством резисторов (реостатное);
3) изменением подводимого к якорю двигателя напряжения.
Реостатное регулирование скорости двигателя
Реостатное регулирование скорости электроприводов осуществляется путем изменения активных сопротивлений резисторов, включенных в главные цепи двигателей. При этом для двигателей постоянного тока имеются в виду резисторы, включаемые в цепи обмоток якоря. При регулировании скорости сопротивлением в цепи якоря во всем диапазоне имеем .

видно, что включение добавочного сопротивления в цепь якоря позволяет изменять скорость вниз от скорости идеального холостого хода, при этом жесткость механических характеристик резко уменьшается, особенно при больших значениях добавочного сопротивления (рис. 5.1).


Рисунок 5.1 — Схема включения и механические характеристики двигателя постоянного тока параллельного возбуждения при реостатном регулировании скорости
Диапазон реостатного параметрического регулирования тока и момента ограничен сверху перегрузочной способностью двигателя по условиям коммутации, а пределы изменения скорости, в которых можно получить заданную точность регулирования, уменьшаются с ростом статической жесткости. Таким образом при условии МС = const диапазон регулирования обычно не превосходит 13.
Потери мощности при реостатном регулировании пропорциональны потребляемой мощности и перепаду угловой скорости, выраженному в относительных единицах. Так, если момент нагрузки постоянен (следовательно, постоянна потребляемая мощность) и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности, потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой в реостате, т. е. данный способ регулирования (реостатный) является не экономичным.
Реостатное регулирование скорости осуществляется простыми и дешевыми техническими средствами и обычно находит применение в тех случаях, когда требования к плавности регулирования невелики, продолжительность работы с пониженной скоростью незначительна и применение более совершенных методов регулирования экономически нецелесообразно (вентиляторы, дымососы).
Регулирование скорости двигателя изменением питающего напряжения
Для реализации рассматриваемого способа регулирования необходимо иметь источник питания, напряжение, на зажимах которого может изменяться в широких пределах. Для электродвигателей постоянного тока в качестве таких источников используются различного рода управляемые преобразователи электрической энергии переменного тока в электрическую энергию постоянного тока. Наиболее широкое применение получили электромашинные и вентильные преобразователи. Регулирование напряжением, так же как и реостатное, осуществляется при постоянном потоке двигателя Ф=Фн=const. Из уравнения

следует, что с изменением осуществляется регулирование только скорости идеального холостого хода

тогда как жесткость механических характеристик при неизменных параметрах цепи якоря сохраняется. При этом механические характеристики представляют собой семейство параллельных друг другу прямых, т. е. имеют одинаковую жесткость (как показано на рис. 5.2), что определяет относительно высокую стабильность угловой скорости.

Рисунок 5.2 — Механические характеристики двигателя при изменении питающего напряжения ()

Диапазон регулирования в системах привода без обратных связей ограничивается значением (810):1, а в замкнутых системах может достигать значений 1000:1 и более.
Модуль жесткости механических искусственных характеристик меньше, чем модуль жесткости естественной характеристики. Однако по сравнению с реостатным регулированием при регулировании в зоне низких скоростей модуль жесткости характеристик оказывается значительно большим, что дает возможность существенно расширить диапазон регулирования скорости.
Регулирование угловой скорости осуществляется вниз от основной, так как напряжение, прикладываемое к якорю, в большинстве случаев может изменяться только вниз от номинального (иногда, например, при регулировании угловой скорости двигателя с постоянными магнитами возможно регулирование как вниз, так и вверх от основной скорости — двухзонное).
Оценив технические и экономические показатели параметрического регулирования скорости изменением напряжения, можно прийти к выводу, что высокие технические показатели регулирования скорости покупаются ценой значительного увеличения габаритов и стоимости электропривода. Дополнительные затраты, связанные с введением управляемого преобразователя, полностью окупаются высокой управляемостью системы, обеспечивающей возможность эффективного автоматического управления всеми режимами работы электропривода и точного автоматического регулирования его координат.
Регулирование скорости двигателя изменением потока возбуждения
Этот принцип регулирования следует непосредственно из анализа выражений для скоростной и механической характеристики:


Ток возбуждения, а значит, и поток могут изменяться лишь в сторону уменьшения по сравнению с номинальными, так как по условиям нормальной работы обмотки возбуждения ток в ней не может длительно превосходить номинальную величину. Кроме того, даже кратковременное увеличение оказывается неэффективным, так как в большинстве случаев магнитные цепи электрических машин уже при номинальном потоке близки и насыщению. Следовательно, речь идет лишь о регулировании скорости путем снижения потока или, как принято говорить, путем ослабления потока возбуждения. Основным достоинством рассматриваемого метода регулирования является то, что мощность обмотки возбуждения невелика и составляет, как правило, 25% мощности двигателя. Для машин малой, а иногда и средней мощности обычно используются резисторы в цепи возбуждения (рис. 5.3,а), а для крупных машин — специальные преобразователи, например генераторы, электромашинные усилители, магнитные усилители, регуляторы напряжения, вентильные преобразователи (рис. 5.3,б).


Рисунок 5.3 — Схемы включения двигателя при регулировании скорости изменением магнитного потока
следует, что для того, чтобы при разных потоках эдс была равна одному и тому же номинальному напряжению сети , частота вращения должна увеличиваться обратно пропорционально ослаблению потока. Например, если поток ослаблен вдвое, то частота вращения должна увеличиться также вдвое и т. д.
Электромеханическим характеристикам при изменении тока возбуждения соответствуют различные значения угловой скорости идеального холостого хода, определяемые по:

На рис. 5.4 по оси ординат отложено значение угловой скорости идеального холостого хода для естественной характеристики, когда поток .
Значения угловых скоростей идеального холостого хода при ослабленном потоке и лежат, очевидно, выше .
![]()



Рисунок 5.4 — Электромеханические и механические характеристики двигателя постоянного тока параллельного возбуждения при регулировании угловой скорости током возбуждения
Все электромеханические характеристики пересекаются с осью абсцисс в одной точке. Последнее следует из того, что при уравнение для любой электромеханической характеристики имеет вид:

откуда определяется ток в якоре двигателя

Следовательно, при различных токах возбуждения и при угловой скорости двигателя, равной нулю, ток в якорной цепи равен току короткого замыкания двигателя. Этим значением тока и определяется общая точка пересечения электромеханических характеристик.

Механические характеристики, показанные на рис. 5.4, имеют те же значения угловых скоростей идеального холостого хода, что и для электромеханических характеристик. Это следует из . Однако эти характеристики не пересекаются в одной точке на оси абсцисс, так как по мере уменьшения потока уменьшается и момент короткого замыкания, определяемый по формуле:

Диапазон регулирования ограничивается различными факторами. Главным из них является ухудшение условий коммутации с возрастанием угловой скорости, поскольку реактивная ЭДС, вызывающая искрение на коллекторе пропорциональна току и угловой скорости, т. е. . Кроме того, при больших угловых скоростях требуется повышать механическую прочность якоря. Нижний предел угловой скорости ограничивается степенью насыщения машины и нагревом обмотки возбуждения, т. е. номинальной угловой скоростью. Большинство двигателей независимого возбуждения, не предназначенных для регулирования скорости, и допускают повышение ее только на 1020%. Двигатели, специально сконструированные для работы с регулированием скорости, дают возможность работать со скоростью, в 35 раз превышающей скорость идеального холостого хода при номинальном значении магнитного потока.

Стабильность угловой скорости при регулировании определяется относительным перепадом угловой скорости при изменении нагрузки. В данном случае при номинальном токе якоря как , поэтому независимо от тока возбуждения относительный перепад сохраняется одним и тем же для естественной и искусственной характеристик, т. е. угловая скорость сравнительно стабильна.

Следует отметить, что ослабление потока однозначно приводит к росту скорости только в том случае, когда момент нагрузки на валу двигателя обратно пропорционален скорости. Если же = const, то увеличение скорости будет иметь место лишь до определенного значении . При дальнейшем снижении потока начнется и снижение угловой скорости, так как в случае = const ослабление потока приводит к увеличению тока якоря , а значит, и к увеличению падения напряжения на сопротивлениях цепи якоря. Начиная с некоторого значения потока в процессе его снижения рост скорости идеального холостого хода идет медленнее, чем уменьшается скорость, обусловленная падением напряжения на .
Оценивая энергетические показатели данного способа регулирования скорости двигателей постоянного тока с параллельным возбуждением, необходимо отметить, что потери в силовой цепи двигателя и его кпд такие же, как и при работе на естественной характеристике. Следует также учитывать, что в связи с относительно малой мощностью цепи обмотки возбуждения по сравнению с номинальной мощностью двигателя затраты на регулировочные устройства (реостаты или преобразователи в цепи обмотки возбуждения) невелики.
Двигатели независимого возбуждения, регулируемые путем ослабления потока, широко применяются для привода механизмов, мощность которых с изменением скорости остается постоянной.
6 Влияние параметров (сопротивление роторной цепи), , f на вид механических характеристик асинхронного двигателя с короткозамкнутым и фазным ротором. Способы регулирования скорости вращения асинхронных двигателей
в последние годы с развитием полупроводниковой техники все большее внимание уделяется применению различных систем регулируемых электроприводов переменного тока с асинхронными двигателями с короткозамкнутым или фазным ротором.
Применение двигателей переменного тока обусловлено их простотой, дешевизной, повышенной надежностью, существенно (в 23 раза) меньшими габаритами и массой по сравнению с двигателями постоянного тока. Кроме того, некоторые способы регулирования угловой скорости не требуют специальных преобразовательных устройств.
Отмечая достоинства двигателей переменного тока, нельзя не обратить внимания на то, что относительно простые способы регулирования угловой скорости электроприводов переменного тока обладают и рядом недостатков, к которым можно отнести в одном случае небольшую плавность, в другом — невысокие энергетические показатели и т. д. Более эффективные способы регулирования осуществляются при помощи сравнительно сложных преобразовательных устройств и средств управления.
Наибольшее распространение получили следующие способы регулирования угловой скорости асинхронного двигателя: 1) реостатное регулирование; 2) переключением числа пар полюсов; 3) частотное регулирование; 4) изменением напряжения на статоре; 5) каскадным включением асинхронного двигателя с другими машинами или преобразователями. Для регулирования угловой скорости, кроме упомянутых, могут быть использованы некоторые другие способы включения электрических двигателей: импульсное регулирование, регулирование изменением подводимого к статору напряжения, регулирование с помощью электромагнитной муфты скольжения и др.
Реостатное регулирование угловой скорости асинхронных двигателей
Введение резисторов в цепь ротора (реостатное регулирование) позволяет, как и для двигателей постоянного тока, регулировать угловую скорость двигателя. Регулирование осуществляется вниз от основной угловой скорости. Плавность регулирования зависит от числа ступеней включаемых резисторов.
Для асинхронных двигателей с фазным ротором применяется регулирование скорости путем изменения сопротивлений в цепи ротора, а для двигателей с короткозамкнутым ротором используются сопротивления в цепи статора, как это показано на рис. 6.1


Рисунок 6.1-Схемы включения резисторов в цепь ротора а) и статора б)


Согласно выражениям (6-1) при увеличении активного сопротивления вторичной цепи увеличивается критическое скольжение, и механическая характеристика становится более мягкой (см. рис. 6.2).


Рисунок 6.2 — Механические характеристики асинхронного двигателя при регулировании скорости изменением сопротивления в цепи ротора а) и статора б)
При увеличении скольжения в 2 раза по сравнению с номинальным, т. е. при снижении скорости всего лишь на 815%, допустимый момент уменьшается в 2 раза. По этой причине диапазон регулирования обычно не превышает (1,52):1.
При неизменном моменте нагрузки и реостатном управлении потери мощности в роторной цепи изменяются пропорционально скольжению, а потери в статоре не зависят от скольжения и остаются неизменными при данном моменте нагрузки. Если, например, скорость двигателя снижена вдвое по сравнению с номинальной, то примерно половина всей потребляемой из сети мощности теряется в регулировочных резисторах. Следовательно, с ростом регулировочного сопротивления при одном и том же скольжении снижается к. п. д.
Рассматриваемый способ регулирования скорости связан со значительными потерями энергии в добавочном сопротивлении и поэтому малоэкономичен. Он применяется главным образом при кратковременной или повторно-кратковременной работе (например, пуско-наладочные режимы некоторых машин, крановые устройства и пр.), а также в приводах с вентиляторным моментом. В последнем случае мощность на валу с уменьшением скорости быстро снижается, и поэтому мощность скольжения и потери в цепи ротора по величине ограничены.
К недостаткам реостатного регулирования скорости относятся также мягкость механических характеристик и зависимость диапазона регулирования от величины нагрузки. В частности, регулирование скорости на холостом ходу практически невозможно.
Реостатное регулирование скорости асинхронного двигателя с фазным ротором продолжает находить практическое применение при невысоких требованиях к точности регулирования.
Реостатное регулирование благодаря своей простоте находит практическое применение, например, в приводе подъемно-транспортных устройств, вентиляторов и насосов малой и средней мощности (до 100 кВт).
Регулирование угловой скорости асинхронного электропривода изменением напряжения
Если регулировать напряжение, подводимое к трем фазам статора асинхронного двигателя, то можно, пренебрегая влиянием регулирующего устройства на характеристики двигателя, изменять максимальный момент, не изменяя критического скольжения. Для изменения напряжения на зажимах статора могут использоваться различные устройства: автотрансформаторы, дроссели насыщения, тиристорные регуляторы напряжения.
В случае ненасыщенной магнитной цепи машины максимальный момент при пониженном напряжении снижается пропорционально квадрату напряжения:

где , — соответственно максимальные моменты, развиваемые двигателем при сниженном и номинальном напряжениях; , — соответственно пониженное и номинальное напряжения.
Критическое скольжение, не зависящее от напряжения, остается неизменным. Не изменяется также и синхронная угловая скорость, которая зависит только от частоты питающего напряжения и числа пар полюсов двигателя.
Регулирование угловой скорости двигателя при этом способе происходит за счет уменьшения модуля жесткости механических характеристик и осуществляется вниз от номинальной угловой скорости. Плавность регулирования определяется плавностью изменения напряжения; при применении тиристорного регулятора напряжения угловая скорость регулируется бесступенчато.
Механические характеристики двигателя с короткозамкнутым ротором при регулировании напряжения на статоре приведены на рис. 6. Из этих характеристик следует, что пределы регулирования весьма ограничены даже при использовании вентиляторной нагрузки, но они могут быть существенно расширены в замкнутых системах электропривода. В действительности вследствие уменьшения критического скольжения из-за влияния параметров регулирующего устройства пределы регулирования в разомкнутых системах еще уменьшаются.
Так как большие потери мощности скольжения в двигателе с короткозамкнутым ротором выделяются в самом роторе, то допустимый момент резко уменьшается по мере роста скольжения, поэтому такой неэкономичный способ регулирования угловой скорости асинхронного двигателя с короткозамкнутым ротором можно использовать только при малой мощности двигателя и в кратковременном режиме работы.

Рисунок 6.3 — Механические характеристики двигателя с короткозамкнутым ротором при регулировании напряжения на статоре
Лучшее использование двигателя и более благоприятные характеристики могут быть получены, если применить двигатель с фазным ротором, в роторную цепь его включить дополнительный нерегулируемый резистор и регулировать напряжение на статоре (рис. 6.4, а). Механические характеристики для рассматриваемого способа приведены на рис. 6.4, б. Преимущество этого способа по сравнению с реостатным заключается в том, что управление двигателем осуществляется плавно и исключается контактная аппаратура в роторной цепи.
Потери энергии в приводе получаются примерно такими же или несколько больше, как и при реостатном регулировании; потери мощности скольжения в основном выносятся из двигателя и выделяются в дополнительном резисторе, что увеличивает допустимый момент. Этот способ может быть использован при вентиляторной нагрузке для продолжительного режима, а при Мс = const для кратковременного режима работы. Очевидно, что регулирование изменением напряжения может быть осуществлено только вниз от основной угловой скорости.
Механические характеристики (рис. 6.4, б) по мере снижения напряжения становятся мягкими и не обеспечивают стабильности угловой скорости при возможном отклонении нагрузки. Кроме того, наличие постоянно включенного резистора приводит к недоиспользованию двигателя по скорости (угловая скорость всегда меньше номинальной) и по мощности. Повышение стабильности угловой скорости и расширение диапазона регулирования до (510):1 достигается в замкнутых системах.


Рисунок 6.4 — Схема включения двигателя с фазным ротором с нерегулируемым резистором в роторной цепи и регулированием напряжения на статоре (а) и механические характеристики (б)
Для регулирования напряжения используются как тиристорные регуляторы напряжения с фазовым управлением, так и реакторы насыщения, автотрансформаторы и импульсные, например тиристорные или контактные регулирующие устройства.
Если регулирование скорости осуществляется с помощью тиристорного регулятора напряжения с фазовым управлением, то возникают дополнительные потери в двигателе, обусловленные высшими гармониками в кривой напряжения. Потери в меди статора и ротора за счет высших гармоник возрастают в среднем на 10%. Общие электромагнитные потери в меди и стали двигателя, рассчитанные с учетом высших гармоник, возрастают не более чем на 10—12% по сравнению с общими потерями, определенными при синусоидальном напряжении.
При снижении напряжения, подводимого к статору, уменьшается магнитный поток двигателя, что при постоянстве момента нагрузки приводит к возрастанию токов ротора и статора, поэтому возрастают потери и превышение температуры обмоток двигателя. Возрастание потерь и, кроме того, ухудшение условий вентиляции двигателя с уменьшением угловой скорости приводит к необходимости снижения допустимого момента.
Регулирование скорости изменением напряжения, подводимого к статору, находит применение преимущественно при использовании двигателей небольшой мощности (до 2030 кВт) с контактными кольцами при включении дополнительного сопротивления в роторной цепи для механизмов повторно-кратковременного и кратковременного режимов работы.
Частотное регулирование скорости асинхронных электроприводов
Принципиальная возможность регулирования угловой скорости асинхронного двигателя изменением частоты питающего напряжения следует непосредственно из выражения:

Питание асинхронных двигателей осуществляется при этом не от общей сети, а от преобразователя частоты ПЧ, показанного на рис. 6.5, энергия к которому подводится от сети постоянной частоты f1С и напряжения U1С. На выходе преобразователя, как правило, меняется не только частота f1, но и напряжение U1. Для преобразования частоты могут быть использованы электромашинные или полупроводниковые устройства, различающиеся по принципу действия и конструкции.

Рисунок 6.5 — Схема включения асинхронных двигателей, получающих питание от преобразователя частоты
При регулировании частоты возникает также необходимость регулирования напряжения источника питания. Действительно, э. д. с. обмотки статора асинхронного двигателя пропорциональна частоте и потоку:

С другой стороны, пренебрегая в первом приближении падением напряжения на сопротивлениях обмотки статора, т. е. полагая , можно записать:
Из приведенного выражения следует, что при неизменном напряжении источника питания и регулировании его частоты изменяется магнитный поток асинхронного двигателя. В частности, уменьшение частоты приводит к возрастанию потока и как следствие к насыщению машины и увеличению тока намагничивания, что связано с ухудшением энергетических показателей двигателя, а в ряде случаев и с его недопустимым нагревом. Увеличение частоты приводит к снижению потока двигателя, что при постоянном моменте нагрузки на валу в соответствии, с выражением приводит к возрастанию тока ротора, т. е. к перегрузке его обмоток по току при недоиспользованной стали. Кроме того, с этим связано снижение максимального момента и перегрузочной способности двигателя. Для наилучшего использования асинхронного двигателя при регулировании скорости изменением частоты необходимо регулировать напряжение одновременно в функции частоты и нагрузки.
Регулирование напряжения лишь в функции одной частоты с учетом характеристики механизма может быть реализовано в разомкнутых системах частотного управления.
Регулирование напряжения в функции нагрузки можно осуществить, как правило, лишь в замкнутых системах, в которых при использовании обратных связей напряжение при данной частоте может изменяться в зависимости от нагрузки.
По мере снижения частоты при падает доля э. д. с. по отношению к приложенному напряжению вследствие относительного возрастания падения напряжения в сопротивлении статора с ростом нагрузки, что приводит к уменьшению магнитного потока, а, следовательно, к снижению электромагнитного момента. Как следствие убывания магнитного потока и абсолютного критического скольжения по мере снижения частоты падает максимальный момент и снижается жесткость механических характеристик (см. рис. 6.6).

Рисунок 6.6 — Механические характеристики асинхронного двигателя при частотном управлении по закону .
Изменение частоты источника питания позволяет регулировать скорость асинхронного двигателя как выше, так и ниже основной. Обычно при регулировании выше основной скорости частота источника питания превышает номинальную не более чем в 1,52 раза. Указанное ограничение обусловлено, прежде всего, прочностью крепления обмотки ротора. Кроме того, с ростом частоты питания заметно увеличиваются величины мощности потерь, связанные с потерями в стали статора. Регулирование скорости вниз от основной, как правило, осуществляется в диапазоне до 1015. Нижний предел частоты ограничен сложностью реализации источника питания с низкой частотой, возможностью неравномерности вращения и рядом других факторов. Таким образом, частотное регулирование скорости асинхронного двигателя может осуществляться в диапазоне до 20-30. Использование двигателей специальной конструкции дает возможность расширить диапазон регулирования за счет увеличения верхнего предела скорости. Нижний предел скорости может быть уменьшен путем введения в схему управления различных обратных связей.

Если при регулировании частоты напряжение изменяется таким образом, что Ф=const, то допустимый момент на валу асинхронного двигателя при частотном регулировании скорости также будет неизменным ().
Этот способ регулирования позволяет получить жесткие механические характеристики. Потери мощности при частотном управлении невелики. Это следует из выражения
с учетом того, что двигатель при изменении частоты работает на линейных участках механических характеристик, т. е. при малых скольжениях s. При наличии соответствующего преобразователя частоты можно получить любую плавность регулирования. Важно отметить, что указанные положительные свойства можно реализовать с бесконтактным асинхронным короткозамкнутым двигателем, который является наиболее простым, надежным и дешевым электрическим двигателем.
Частотное регулирование угловой скорости электроприводов переменного тока с двигателями с короткозамкнутым ротором находит все большее применение в различных отраслях техники. Например, в установках текстильной промышленности, где с помощью одного преобразователя частоты, питающего группу асинхронных двигателей, находящихся в одинаковых условиях, плавно и одновременно регулируются их угловые скорости. Примером другой установки с частотно-регулируемыми асинхронными двигателями с короткозамкнутым ротором могут служить транспортные рольганги в металлургической промышленности, некоторые конвейеры и др.
Частотное регулирование угловой скорости асинхронных двигателей широко применяется в индивидуальных установках, когда требуется получение весьма высоких угловых скоростей (например, для центрифуг, шлифовальных станков, для привода электрошпинделей в металлорежущих станках с частотой вращения до 20 000 об/мин).
Экономические выгоды частотного регулирования особенно существенны для приводов, работающих в повторно-кратковременном режиме, где имеет место частое изменение направления вращения с интенсивным торможением.
Основным недостатком электроприводов с частотным управлением является необходимость использования преобразователей частоты, которые в настоящее время характеризуются относительной сложностью по схемному исполнению и высокой стоимостью. Этот недостаток ограничивает применение частотноуправляемых электроприводов. Тем не менее, преимущества этих приводов столь значительны, что на протяжении многих лет и в настоящее время ведутся интенсивные работы по созданию преобразователей частоты для регулирования скорости асинхронных двигателей.
В случае создания приемлемых по сложности и стоимости преобразователей частоты частотноуправляемый привод с асинхронным короткозамкнутым двигателем получит широкое распространение в технике.
Режимы работы электродвигателей.
Режим работы электропривода определяется длительностью и его харак- тером: продолжительный, кратковременный и повторно- кратковременный.
Продолжительный режим – это режим работы такой длительности, при которой за время работы двигателя температура всех устройств электропривода достигает установившегося значения. Пример механизмов с длительным режимом работы: вентиляторы, компрессоры, конвейеры непрерывного транспорта и т.д. Нагрузочная диаграмма режима (рис.2.1.)
При кратковременном режиме рабочий период относительно краток и температура двигателя не успевает достигнуть установившегося режима. Перерыв же в работе исполнительного механизма достаточно велик для того, чтобы двигатель успел охладиться практически до температуры окружающей среды. Такой режим характерен для работы самых различных механизмов кратковременного действия: шлюзов разводных мостов, подъемных шасси самолетов и т.д.
При повторно-кратковременном режиме (рис. 2.2.) периоды работы чередуются с паузами (остановка, холостой ход). причем ни в одном из периодов работы температура двигателя не достигает установившегося значения, а во время снятия нагрузки двигатель не успевает охладиться до температуры окружающей среды. Типичным примером работы в повторно-кратковременном режиме являются электроприводы металлорежущих станков.
Длительность одного рабочего периода и паузы называется циклом. Повторно кратковременный режим характеризуется продолжительностью включения (ПВ%), под которой понимают отношение суммарного времени рабочих периодов к времени продолжительности цикла:
ПВ% = = ∙ 100 = ——— ·100,
где t p -время работы; t 0 –продолжительность паузы;
t Ц – продолжительность цикла.
Стандартные значения ПВ-15,25,40 и 60%. Например, указанные на щитке двигателя 8 кВт при ПВ-40% означает, что двигатель рассчитан на работу с номинальной нагрузкой 8 кВт в течение 4 минут, а последующее 6 минут должен быть отключён от сети.
Расчёт мощности двигателя при повторной кратковременной работе электропривода выполняют по нагрузочной диаграмме механизма предварительным расчётом эквивалентной рабочей мощности и действительного значения ПВ. Затем эквивалентную мощность РЭ РАБ. пересчитывают для ближайшего стандартного значения ПВ НОМ :
По каталогу выбирают двигатель с номинальной мощностью PН при ПВНОМ так, чтобы PН >P. Выбранный двигатель проверяют по перегрузочной способности и пусковому моменту.
Расчет электрической линии включает определение сечение провода, которое обеспечивало бы нормальную работу двигателя, питаемого этой линией.
Сечение проводов рассчитывают по двум условиям – нагреву и отклонению напряжения.
Выбор сечения проводов по условиям нагрева с помощью таблиц заключается в сравнении длительно допустимого тока (Iдоп.) для данного сечения провода, взятого из таблиц, с расчетным значением тока (Iрасч.).
При этом должно соблюдаться условие: Iдоп. ³ Iрасч.
При изменении нагрузки происходит колебание напряжения у потребителя. Допустимые отклонения напряжения в процентах от номинального напряжения сети на зажимах электродвигателя составляют 5%.
В общем виде формула для определения потери напряжения в линии:
где Р – нагрузка, кВт; L – длина линии, м; S – сечение провода, мм 2 .
Значения коэффициента С для различных случаев приведены в табл.4
Основными причинами аварийных режимов электроустановок являются короткие замыкания и перегрузки. Для защиты электроустановок от ненормальных режимов работы применяют защитные аппараты – плавкие предохранители и автоматические выключатели.
Ток плавкой вставки предохранителя, служащего для защиты проводов от токов короткого замыкания, должен удовлетворять соотношению:
Iном.пл.вст. – номинальный ток плавкой вставки;
Iдоп. – допустимый ток по условиям нагрева для защищаемого провода.
Плавкую вставку для защиты электродвигателя выбирают по условию:
Iпуск. – пусковой ток электродвигателя;
a — коэффициент кратковременной перегрузки плавкой вставки;
a = 2,5 – для двигателей, пускаемых без нагрузки;
a = 2,0 – для двигателей, пускаемых под нагрузкой;
a = 1,6 – для двигателей с затяжным пуском.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Условия и режимы работы конвейеров
На всех этапах при проектировании, изготовлении и эксплуатации машин непрерывного транспорта, необходимо четко определить и в дальнейшем учитывать, какие факторы будут накладывать ограничения. Этими факторами могут быть как местные условия, загруженность машины, так и влияние свойств транспортируемого груза.
2.1. Условия и режимы работы конвейеров
Рекомендуемые материалы
2.1.1. Режимы работы конвейеров
Для выбора типов и параметров конвейеров и расчета узлов на прочность и долговечность необходимо учитывать условия их работы и режим эксплуатации.
Работу конвейеров характеризуют три группы показателей.
1. Фактическое (эксплуатационное) время работы.
2. Нагрузки, действующие на конвейер и его элементы и продолжительность их действия.
3. Условия производства и окружающей среды, в которой работает конвейер.
Совокупность этих показателей определяет условия и режим работы конвейера.
Известно, что срок службы машины зависит как от конструкции, так и от интенсивности использования этой машины и её отдельных элементов.
В чем смысл режима работы? Режим работы конвейера – комплексная характеристика, учитывающая характер внешних нагрузок и интенсивность использования машины во время ее эксплуатации.
Классификация по режимам работы имеет большое значение. Она дает возможность подобрать определенный конвейер, механизм или сборочные единицы и поэтому служит основой взаимоотношений между потребителем и изготовителем.
Расчетчик и конструктор получают исходные данные для проектирования с учетом эксплуатации, чтобы обеспечить требуемый уровень безопасности, долговечности и надежности.
Характеристика «режим работы» является определяющей при выполнении расчетов на прочность, выносливость деталей механизмов и металлоконструкций, при выборе стандартных изделий (канаты, тормоза, редукторы и т. д.).
Различают пять режимов работы конвейеров: ВЛ – весьма легкий;
Л – легкий; С – средний; Т – тяжелый; ВТ – весьма тяжелый.
Режимы работы определяются сочетанием классов использования конвейеров по времени В и производительности П. Класс использования по времени устанавливается по табл. 2.1.
Класс использования по времени
Время фактической работы конвейера
Класс использования по времени
Классы использования конвейера по производительности определяются общим коэффициентом загрузки
 ,
,
где Qср – средняя производительность; Qmax – максимальная производительность конвейера.
Максимальной считается такая производительность, которую можно обеспечить при полном использовании загрузочного устройства (питатель, загрузчик и т. п.), т. е., конвейер не сможет переместить больше, чем на него может погрузить установленное перед ним загрузочное устройство при своей наибольшей производительности.
Средняя производительность конвейера
 ,
,
где Qi – производительность конвейера в характерный промежуток времени  в общем времени смены tсм.
в общем времени смены tсм.
Зная коэффициент загрузки, можно определить класс использования по производительности (табл. 2.2).
Класс использования по производительности
загрузки kп
Режимы работы конвейеров определяются по сочетаниям классов использования по времени и производительности (табл. 2.3).
Режимы работы
Класс использования по производительности
2.1.2. Условия работы конвейера
Окружающая конвейер среда характеризуется:
· составом и концентрацией пыли;
· насыщением воздуха парами химических веществ, газами и т. п.
· пожаро- и взрывоопасностью.
Исполнения конвейеров с учетом климата использования:
– влажного тропического – ТВ;
– сухого тропического – ТС;
Если конвейер устанавливается в нескольких помещениях с различными производственными и температурными условиями, то в качестве расчетной базы принимается помещение с наихудшими условиями.
Условия эксплуатации могут быть:
Разделяют качественные и количественные показатели условий работы конвейеров. Качественные показатели характеризуют место установки конвейера, в том числе доступность для обслуживания, освещенность и т. д., а количественные показывают численные значения факторов, влияющих на работу конвейера (например, влажность, температура, запыленность и т. д.). Важно оценить весь комплекс показателей в целом и назначить соответствующие условия работы.
Показатели, определяющие условия работы конвейеров, приведены в табл. 2.4.
Условия работы конвейера
· насыпная плотность, т/м 3 ;
· размер куска, мм;
· абразивность и коррозионность
Окончание табл. 2.4
Наличие в воздухе абразивной пыли, мг/м 3
Температура окружающего воздуха, °С:
Место установки конвейера и его характеристика
Чистое, сухое, отапливаемое помещение; отсутствует абразивная пыль; конвейер доступен для осмотра и ремонта
Отапливаемое помещение; небольшое количество абразивной пыли; временами влажный воздух; средняя доступность для обслуживания
Работа в неотапливаемых помещениях с естественной вентиляцией, под навесами или легкими укрытиями с условиями, близкими к условиям открытого воздуха, на открытом воздухе. Возможны большое количество абразивной пыли или повышенная влажность воздуха. Плохая доступность для обслуживания
Работа в неотапливаемых помещениях с условиями, близкими к условиям открытого воздуха и на открытом воздухе в очень пыльной атмосфере и при наличии факторов, вредно влияющих на работу конвейера
2.2. Характеристики и свойства транспортируемых
грузов как объектов перемещения
Для правильного выбора типа конвейера необходимо учитывать существенные для процесса транспортирования физико-механические свойства грузов.
Грузы, перемещаемые машинами непрерывного транспорта, разделяют на штучные и насыпные (навалочные, массовые).
Штучными называют единичные грузы, транспортируемые отдельными единицами или группой единиц. Разновидностью их являются грузы в таре. Тарой служат ящики, бочки, мешки, кипы, контейнеры, поддоны и пакеты.
Размеры и виды тары обычно стандартизованы, что упрощает процесс транспортировки. Использование тары улучшает возможности применения машин непрерывного транспорта и их сочетания с транспортными средствами (вагоны, автомобили), сокращает число перегрузок, способствует унификации грузонесущих элементов машин.
Тару широко используют при перемещении грузов подвесными, роликовыми, пластинчатыми конвейерами.
Штучные грузы характеризуются следующими свойствами:
· массой одной штуки;
· коэффициентом внешнего трения о поверхность грузонесущего органа.
Тарно-штучные грузы весом до 15 кг – легкие; от 15 до 50 кг – средние; от 50 до 200 кг – тяжелые; свыше 200 кг – весьма тяжелые.
Размеры штучных грузов:
· от нескольких сантиметров (почтовые отправления);
· до нескольких метров (прокат, лесоматериалы).
Насыпными, или навалочными, называют грузы, состоящие из частиц (кусков) различной формы, хранимые и перемещаемые навалом (например, руда, уголь, торф, щебень, песок).
Ниже приводятся свойства, которыми характеризуются насыпные грузы.
1. Плотность – отношение массы груза к занимаемому им объему ρн, т/м 3 .
Для грузов, представляющих собой куски различной крупности, используют понятие насыпной плотности, численно равной массе единицы объема груза при свободной насыпке.
По плотности грузы разделяют на следующие группы:
· легкие (торф, кокс, мука, древесные опилки) –  т/м 3 ;
т/м 3 ;
· средние (зерно, шлак, каменный уголь) –  т/м 3 ;
т/м 3 ;
· тяжелые (гравий, щебень, песок) –  т/м 3 ;
т/м 3 ;
· весьма тяжелые (железная и медная руда) –  т/м 3 .
т/м 3 .
2. Кусковатость (гранулометрический состав) – количественное распределение частиц по крупности.
Если частица (кусок) в трех измерениях имеет размеры аx, аy, и аz, то расчетный размер куска  .
.
Кусковатость с частицами размером более 0,05 мм определяют ситовым анализом (грохочением); если менее 0,05 мм – проводится гидравлический анализ. Критерий – различие скорости оседания в воде.
Насыпные грузы по однородности кусков разделяются на рядовые и сортированные.
Для рядовых грузов коэффициент однородности размеров частиц груза
k0 = amax/amin > 2,5 ,
где amax и amin – соответственно наибольший и наименьший размеры частицы.
Для сортированных (просеянных, разделенных на однородные фракции) грузов
k0 = amax/amin < 2,5.
Все насыпные грузы – и рядовые, и сортированные – характеризуются размером типичного куска a‘:
· для сортированных грузов
 ;
;
· для рядовых грузов учитывается их процентное содержание в пробе А (рис. 2.1):
 .
.

Рис. 2.1. Гранулометрический состав груза
Куски груза размером от 0,8·атах до атах составляют группу наибольших кусков. Размер типичного куска:
а) для рядового материала при массе группы наибольших кусков А меньше 10 % массы пробы
б) для рядового материала при массе группы наибольших кусков А больше 10 % массы пробы
В зависимости от размера а’ типичного куска насыпные грузы делятся, мм:
· на особо крупнокусковые (например, камни) – 320 < а’ < 500;
· крупнокусковые (например, руда) – 160 < а’ < 320;
· среднекусковые (например, уголь) – 60 < а’ < 160;
· легкокусковые (например, щебень) – 10 < а’ < 60;
· крупнозернистые (например, зерно) – 2 < а’ < 10;
· мелкозернистые (например, крупный песок) – 0,5 < а’ < 2;
· порошкообразные (например, мелкий песок) – 0,05 < а’ < 0,5;
· пылевидные (например, цемент) – а’ < 0,05.
Кусок размером более 500 мм считается «негабаритом» и перед транспортированием должен дробиться.
Кусковатость насыпных грузов учитывается при определении размеров несущих элементов конвейеров (ширины ленты, настила), а также выходных отверстий бункеров, воронок.
При транспортировке пылевидных грузов требуется применять герметичные конвейеры и предусматривать меры против пылеобразования, особенно в местах погрузки-выгрузки.
3. Угол естественного откоса φ – это угол между образующей конуса из свободно насыпанного груза и горизонтальной плоскостью (рис. 2.2).

Рис. 2.2. Схема к определению угла естественного откоса насыпного груза:
а – заполненный грузом цилиндр; б – конус из свободно насыпанного груза
Для определения этого угла груз насыпается в цилиндр, не имеющий дна и крышки, который установлен на горизонтальной плоскости (рис. 2.2, а). Затем цилиндр медленно поднимается вверх. Так образуется конус из свободно насыпанного груза (рис. 2.2, б).
Этот угол зависит от взаимной подвижности частиц груза, которая, в свою очередь, зависит от сил трения между ними и сил сцепления между частицами.
При движении груз рассыпается сильнее, что необходимо учитывать при проектировании конвейера, а именно при выборе размеров рабочих элементов. При сдвиге и последующем равномерном движении угол откоса груза в движении φсд = 0,7 φ; при реальной работе конвейера возникают дополнительные колебательные воздействия на груз, что приводит к более значительному рассыпанию груза, поэтому угол реального расположения материала на движущемся грузонесущем органе φдв = (0,35…0,55) φ.
4. Подвижность (сыпучесть) – характерная особенность сыпучих материалов, связана с величиной угла естественного откоса груза. Зависит, как уже упоминалось выше, от сил трения между частицами и сил сцепления между частицами груза. Рассмотрим диаграмму напряжений в сыпучем теле (рис. 2.3).
Угол наклона прямой φвн, называемый углом внутреннего трения груза, выражает зависимость сопротивления сдвига материала (касательных напряжений)  от внутреннего нормального напряжения σ. Отличен для разных материалов.
от внутреннего нормального напряжения σ. Отличен для разных материалов.

Рис. 2.3. Диаграмма напряжений в сыпучем теле
Условие начала взаимного движения частиц
 ,
,
где  – наибольшие касательные напряжения в заданной точке насыпного груза, Па.
– наибольшие касательные напряжения в заданной точке насыпного груза, Па.
При этом tgφвн называется коэффициентом внутреннего трения материала;  – начальное сопротивление сдвигу (характеризует начальную силу сцепления между частицами). При – идеально сыпучие грузы; – связные грузы. Для хорошо сыпучих грузов угол естественного откоса равен углу внутреннего трения, т. е. φ = φвн.
– начальное сопротивление сдвигу (характеризует начальную силу сцепления между частицами). При – идеально сыпучие грузы; – связные грузы. Для хорошо сыпучих грузов угол естественного откоса равен углу внутреннего трения, т. е. φ = φвн.
5. Коэффициент внешнего трения fо о грузонесущие элементы зависит от того, в покое материал или в движении, и определяется экспериментально.
Угол наклона конвейеров обычно не превышает угла внешнего трения.
6. Абразивность – способность груза истирать рабочие поверхности элементов конвейера, зависит от твердости частиц груза по
10-балльной шкале. Категории: А – неабразивные; В – малоабразивные; С – среднеабразивные; Д – высокоабразивные.
Кроме отмеченных основных свойств, насыпные грузы характеризуются рядом других, не менее важных, а во многих случаях и решающих при выборе схемы транспортирования и элементов транспортирующих устройств:
– липкостью (обычно характерна для влажных грузов, но иногда проявляется и для сухих, особенно тонкодисперсионных грузов);
– режущей способностью (наличие острых углов, граней у кусков);
– коррозионностью (вызывает коррозию соприкасающихся с грузом материалов, например, соль, химические удобрения);
– гигроскопичностью (склонность к поглощению влаги из окружающего воздуха);
– слеживаемостью (свойство грузов терять подвижность при длительном хранении);
– сводообразованием (образование сводов из частиц груза над выпускными отверстиями бункеров);
– самовозгораемостью (способность к воспламенению под действием происходящих в грузе химических реакций, например, влажное зерно, уголь каменный, карбид кальция);
– взрывоопасностью (кроме взрывчатых, характерно для пылящих грузов, например, мука, зерно, уголь);
– хрупкостью (склонность к разрушению частиц в процессе загрузки, транспортирования и разгрузки);
– вредностью для здоровья (химические, пылящие, ядовитые, радиоактивные, выделяющие резкие запахи грузы);
– биологической активностью и др.
Характеристики большинства видов перемещаемых грузов можно определить по [1, 3–8].
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Чем определяются условия работы машин непрерывного транспорта?
2. Чем определяются режимы работы машин непрерывного транспорта?
3. Назовите физико-механические характеристики насыпного груза как объекта перемещения.
4. Что такое насыпная плотность? На что влияет насыпная плотность?
5. Что такое угол естественного откоса груза? От чего зависит величина угла для того или иного насыпного груза?
5. Назовите физико-механические характеристики штучного груза как объекта перемещения.