Формирователи прямоугольных импульсов
Формирователи прямоугольных импульсов создают их из синусоидальных изменений напряжений или импульсов другой формы. В частности, прямоугольные импульсы могут быть сформированы из одиночных коротких импульсов треугольной или трапециевидной форм, из импульсов колоколообразной или экспоненциальной форм и переменных напряжений произвольной формы.
Формирователи прямоугольных импульсов из синусоидального напряжения.
Во многих случаях возникает задача формирования прямоугольных импульсов из переменных напряжений синусоидальной формы. Для этой цели можно использовать диодную схему ограничения напряжения сверху и снизу с последующим применением ждущего мультивибратора или другого формирователя прямоугольных импульсов. Наиболее простой схемой, непосредственно формирующей прямоугольные импульсы из синусоидального напряжения, является генератор импульсов напряжения на транзисторном ключевом каскаде, (рис. 4.1, а). Для биполярных

Рис. 4.1. Структурные схемы формирователей прямоугольных импульсов: а — на транзисторе; б — инверторе НЕ; в — элементе ИЛИ-НЕ транзисторов в этом каскаде номиналы сопротивлений примерно следующие: R]= 10 кОм, R2= 3,3 кОм. В такой схеме используются нелинейные свойства работы транзистора в режимах отсечки и насыщения. На ее выходе формируется последовательность практически прямоугольных импульсов 1/вых при поступлении на вход синусоидального напряжения UM. Недостатками такого формирователя являются относительно пологие фронты и срезы импульсов в последовательности и довольно большое входное напряжение (20. 30 В). Транзистор не имеет базового напряжения смещения, поэтому при отсутствии напряжения на входе он закрыт. При поступлении положительного полупериода входного сигнала транзистор полностью открывается и переходит в режим насыщения. При этом напряжение на его выходе падает до нуля. В течение отрицательного полупериода входного сигнала транзистор полностью закрыт и находится в режиме отсечки, при котором напряжение на его выходе равно напряжению питания.
Аналогичные формирователи могут быть выполнены на логических элементах: инверторе НЕ (рис. 4.1, б) и элементе ИЛИ-НЕ (рис. 4.1, в). На этих элементах получают прямоугольные импульсы ?4ых с резким фронтом и срезом при изменении входного напряжения в пределах 0. 5 В.
Другим примером является формирователь прямоугольных импульсов, собранный на двух логических элементах ИЛИ-HE, соединенных как /?5-триггер с прямыми входами (рис. 4.2, а). Дополнительно к входу R подключен инвертор, на вход которого подается входное синусоидальное напряжение вх.
Формирователь работает следующим образом (рис. 4.2, б). При синусоидальном изменении входного напряжения Uw наступает


Рис. 4.2. Формирователь прямоугольных импульсов на /?5-триггере
а — структурная схема; б — эпюры напряжений момент, когда на входе 5 элемента ИЛ И-НЕ образуется положительное напряжение, соответствующее уровню логической 1. Триггер принимает устойчивое состояние, при котором выходы Q= 1 и Р= 0. Такое состояние сохраняется до тех пор, пока напряжение на входе инвертора не станет ниже уровня, соответствующего его логическому нулю. В этот момент сигнал на выходе инвертора будет соответствовать логической 1 и поступит на вход R триггера, что приведет к смене состояния на выходах Р= 1 и Q=0. В соответствии с изложенным, на верхней эпюре напряжения показан синусоидальный сигнал на входе 5схемы и пунктиром обозначены моменты перехода входного напряжения к значению, соответствующему логической единице (5=1). Ниже показаны сигналы с инвертора, поступающие на вход R. Моменты появления логической единицы (/?= 1) на входе Rтакже обозначены вертикальными пунктирными линиями. Этим моментам соответствуют переходы формирователя в новое состояние. В результате работы формирователя на его выходе образуется последовательность прямоугольных импульсов напряжения, следующих с той же частотой, что и частота входного сигнала. Вместо логических элементов ИЛИ-HE в схеме (см. рис. 4.2, а) можно использовать интегральную микросхему /?5-триггера, к входу R, которого подключен выход инвертора НЕ.
Как из синусоиды сделать прямоугольный импульс схема
Формирователи прямоугольных импульсов создают их из синусоидальных изменений напряжений или импульсов другой формы. В частности, прямоугольные импульсы могут быть сформированы из одиночных коротких импульсов треугольной или трапециевидной форм, из импульсов колоколообразной или экспоненциальной форм и переменных напряжений произвольной формы.
Формирователи прямоугольных импульсов из синусоидального напряжения.
Во многих случаях возникает задача формирования прямоугольных импульсов из переменных напряжений синусоидальной формы. Для этой цели можно использовать диодную схему ограничения напряжения сверху и снизу с последующим применением ждущего мультивибратора или другого формирователя прямоугольных импульсов. Наиболее простой схемой, непосредственно формирующей прямоугольные импульсы из синусоидального напряжения, является генератор импульсов напряжения на транзисторном ключевом каскаде, (рис. 4.1, а). Для биполярных
Рис. 4.1. Структурные схемы формирователей прямоугольных импульсов: а — на транзисторе; б — инверторе НЕ; в — элементе ИЛИ-НЕ транзисторов в этом каскаде номиналы сопротивлений примерно следующие: R]= 10 кОм, R2= 3,3 кОм. В такой схеме используются нелинейные свойства работы транзистора в режимах отсечки и насыщения. На ее выходе формируется последовательность практически прямоугольных импульсов 1/вых при поступлении на вход синусоидального напряжения UM. Недостатками такого формирователя являются относительно пологие фронты и срезы импульсов в последовательности и довольно большое входное напряжение (20. 30 В). Транзистор не имеет базового напряжения смещения, поэтому при отсутствии напряжения на входе он закрыт. При поступлении положительного полупериода входного сигнала транзистор полностью открывается и переходит в режим насыщения. При этом напряжение на его выходе падает до нуля. В течение отрицательного полупериода входного сигнала транзистор полностью закрыт и находится в режиме отсечки, при котором напряжение на его выходе равно напряжению питания.
Аналогичные формирователи могут быть выполнены на логических элементах: инверторе НЕ (рис. 4.1, б) и элементе ИЛИ-НЕ (рис. 4.1, в). На этих элементах получают прямоугольные импульсы ?4ых с резким фронтом и срезом при изменении входного напряжения в пределах 0. 5 В.
Другим примером является формирователь прямоугольных импульсов, собранный на двух логических элементах ИЛИ-HE, соединенных как /?5-триггер с прямыми входами (рис. 4.2, а). Дополнительно к входу R подключен инвертор, на вход которого подается входное синусоидальное напряжение
Как из синусоиды сделать прямоугольный импульс схема
Как из синусоиды сделать прямоугольный импульс схема
С уважением, Алексей.
| Меню пользователя ALEX__A |
| Посмотреть профиль |
| Отправить личное сообщение для ALEX__A |
| Найти ещё сообщения от ALEX__A |
| Меню пользователя fanworl |
| Посмотреть профиль |
| Отправить личное сообщение для fanworl |
| Найти ещё сообщения от fanworl |
Уважаемый fanworl, не заморачивайтесь теоретическими сложностями! Тут есть много любителей углубиться в такие глухие дебри, что потом из них и сами не выберутся!
Давайте разделим: мухи — отдельно, котлеты — отдельно. Если я правильно понял, у вас имеется в наличии генераторный датчик, формирующий по выходу сигнал, напряжение которого пропорционально частоте вращения вала?
А все предыдущие посты касались частоты этого синусоидального напряжения, которая в первом приближении по умолчанию также принималась пропорциональной частоте вращения вала.
В первую очередь нужно было бы глянуть осциллографом, что же в самом деле происходит с сигналом при различных частотах вращения. Если частота синусоидального сигнала меняется — это резко упрощает дело. Конечно, тупой триггер Шмитта может и не обеспечить формирование меандра при низких частотах вращения (и, соответственно, малой амплитуде сигнала) — здесь необходимы схемотехнические ухищрения, но «Если вы хотите песен, так их у нас есть».
Если осциллографа в наличии нет, то хотя бы приведит тип датчика — может у кого-нибудь есть на него данные или опыт по использованию.
Если же четкой зависимости между частотой врещения и частотой выходного сигнала нет (теоретически возможно и такое), или не удовлетворяет имеющийся частотный диапазон, тогда ухищрения просто будут несколько посложнее.
Очень важный вопрос: куда этот сигнал потом будет подаваться? От этого зависит выходной каскад схемы.
| Меню пользователя falkonist |
| Посмотреть профиль |
| Найти ещё сообщения от falkonist |
| Меню пользователя EVGENIY1962 |
| Посмотреть профиль |
| Отправить личное сообщение для EVGENIY1962 |
| Найти ещё сообщения от EVGENIY1962 |
Автор намешал святое с праведным описывая вводную. Ему, я так понял, необходимо (цитата): «чтобы количество импульсов было пропорционально увеличению напряжения, а следовательно — скорости». Упрощу: чем больше скорость, тем большее количество прямоугольных импульсов должен выдать прибор в постоянную еденицу времени, например, в одну секунду.
Так же он говорит, что на тросике спидометра «висит» генератор. Я читаю — электромотор переменного тока. Естественно при увеличении количества оборотов растёт КАК амплитуда напряжения, ТАК и его частота. Поэтому скорость можно измерить как по изменению амплитуды, так и по изменению частоты на выходе датчика (мотора/генератора).
Слово за автором. Я всё правильно понял? Уточняйте, а то в клоаку ненужных рассуждений опустимся.
| Меню пользователя dimitriy |
| Посмотреть профиль |
| Отправить личное сообщение для dimitriy |
| Найти ещё сообщения от dimitriy |
Предположим, что действительно частота генирируемого синусоидального напряжения постоянна, и от частоты вращения вала датчика зависит только уровень выходного напряжения. Это возможно лишь в одном случае — при использовании асинхронного тахогенератора. Однако, для работы подобного устройства необходим источник переменного напряжения выполняющий функцию источника питания обмотки возбуждения указанного тахогенератора.
Следующие два варианта тахогенераторов — это либо машины постоянного тока, рассматривать которые не имеет смысла, поскольку на выходе напряжение постоянного тока, либо синхронные тахогенераторы, амплитуда и частота выходного напряжения которых зависит от частоты вращения вала тахогенератора.
По данным автора, с учётом всего вышеизложенного, становится очевидным, что он имеет дело именно с синхронным тахогенератором, а следовательно возможно использование двух методов преобразования выходного напряжения в последовательность прямоугольных импульсов, частота которых пропорциональна частоте вращения вала тахогенератора:
1. Используя в качестве информационного параметра частоту синусоидального напряжения (преобразователь на базе триггера Шмитта).
2. Используя в качестве информационного параметра амплитуду генерируемого синусоидального сигнала, устройства реализующие данный метод носят общее название преобразователи напряжение-частота и широко описаны в литературе.
В сложившийся ситуации, на мой взгляд, применение первого метода наиболее оптимально.
Генераторы синусоидальных и прямоугольных импульсов
Две нижние схемы иллюстрируют генерацию низкочастотных синусоидальных колебаний путем сдвига фазы сигнала через RC. Колебание происходит там, где общий сдвиг фазы будет 360 градусов. Транзисторная схема (справа) производит синусоиды на коллекторе 3904, который поступает на буферный JFET, с которого выходит низкий импеданс.
Возможно, потребуется настроить резистор 500 Ом для достижения стабильной волны с минимальным искажением. Транзистор схема не рекомендуется для практического применения из-за необходимости долгой корректировки.
Генератор на основе фазового сдвига ОУ является гораздо более стабильным, чем версия на транзисторах, так как усиление может быть установлено выше, чем необходимо для поддержания колебаний. Выход берется из RC, которая отфильтровывает большую часть гармонических искажений.
Выходное напряжение имеет коэффициент усиления около 28 дБ. Частота составляет около 600 Гц для значений RC (7.5K и 0,1 мкФ), и может быть уменьшена пропорционально увеличению номинала резисторов (7.5K). Значение 7.5K на выводе 2 ОУ регулирует усиление. Выбран так, что выход на выводе 1 слегка обрезан при положительных и отрицательных пиках. Выходное напряжение на выводе 7 составляет около 5 вольт при питании 12 вольт.
Прямоугольный генератор на триггере Шмитта
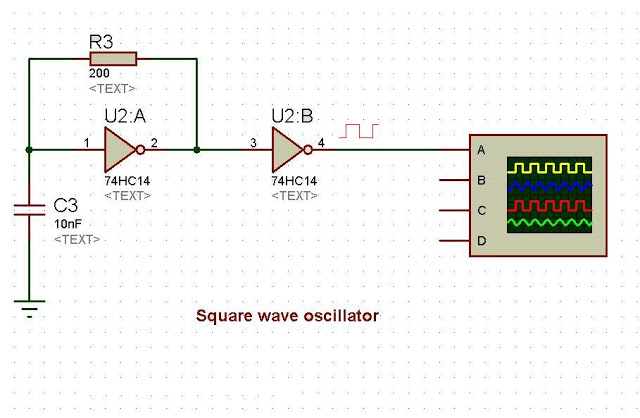
Представляю генератор прямоугольных волн, в котором использовал триггер Шмитта с CMOS.
Он имеет гистерезисные характеристики. Когда напряжение на входе находится на уровне H, выходной сигнал будет 0. При уровне напряжения L, на выходе становится +5 V.
При использовании 74HC14, грубую оценку значения частоты колебаний можно рассчитать по следующей формуле.
Подключение входа и выхода (биполярные транзисторы)
. Проверьте 74HC04, например. Это дает вам шесть отдельных инверторов в одном 14-контактном корпусе. Есть также одиночные инверторы (и другие маленькие логические вентили), доступные в небольших пакетах SOT-23, то есть в том же пакете, в который входят отдельные транзисторы.
Существует мало причин, чтобы попытаться сделать свой собственный инвертор, но да, это возможно.
Что такое синусоидальная ШИМ (SPWM)
SPWM расшифровывается как Sinusoidal Pulse Width Modulation и переводится как синусоидальная ШИМ (широтно-импульсная модуляция). Ранее мы ее уже рассматривали в генераторе синусоидальных и прямоугольных импульсов на Arduino.
Как мы знаем, в ШИМ мы можем изменять ее скважность (коэффициент занятости, duty cycle), то есть соотношение периодов активности (on-time) и неактивности (off-time). Таким образом, изменяя скважность ШИМ, мы изменяем среднее напряжение импульса. Это наглядно показано на следующей картинке.

Как видно из представленной картинки, при скважности (коэффициенте заполнения) 100% мы получаем среднее выходное напряжение 5V, при скважности 50% получаем среднее выходное напряжение 2.5V, а при скважности 25% — еще в 2 раза меньше.
Синусоидальное напряжение представляет собой аналоговое напряжение, которое изменяет свою амплитуду с течением времени, поэтому мы можем воспроизвести «поведение» синусоидальной волны при помощи непрерывного изменения скважности ШИМ волны (сигнала), что показано на следующем рисунке.

Если вы посмотрите на схемы, представленные ниже в данной статье, вы увидите, что на выход трансформатора подключается конденсатор – он как раз и ответственен за сглаживание подобного сигнала переменного тока.
Используемый входной сигнал будет заряжать и разряжать конденсатор в соответствии с входным сигналом и нагрузкой. Мы будем использовать SPWM сигнал (синусоидальный ШИМ сигнал) высокой частоты, он будет иметь сначала очень маленькую скважность 1%, этот 1% будет заряжать конденсатор совсем чуть-чуть, сигнал со скважностью 5% будет заряжать конденсатор немного больше, скважность 10% будет заряжать конденсатор еще больше и постепенно мы достигнем скважности 100%, а после этого мы будем уменьшать скважность до 1%. С помощью этого процесса будет сформирована очень гладкая кривая, очень похожая на синусоидальную волну. Таким образом, обеспечивая правильные значения скважности на входе, мы получим хорошую синусоидальную волну на выходе.
Не по теме в сторону схематического рисунка:
Сценарий на самом деле всего три строчки. Вот весь файл:
@ эхо выключено рем rem MAKE_SCHEM_GIF рем rem Создает хорошо отфильтрованный GIF-файл схемы из необработанного вывода Eagle rem /temp/a.tif. Полученный файл GIF будет /temp/b.gif и будет Рем серая шкала. рем image_filter /temp/a.tif /temp/b.img -shrink 5 image_copy /temp/b.img /temp/b.gif -form -gray image_disp /temp/b.gif -zoom 1 -dev medium
Это очень специфический одноразовый скрипт, но он достаточно хорош для этой цели. В Eagle я экспортирую схему в файл изображения \ temp \ a.tif, запускаю скрипт, который делает \ temp \ b.gif. Параметр Eagle для экспорта изображений: 600 DPI и монохромный. На самом деле, это все, что нужно сделать. Наверное, звучит сложнее, чем есть.
Как работает инвертор на основе SPWM сигнала
Схема подобного инвертора показана на следующем рисунке.

Как вы видите, мы использовали в схеме два MOSFET транзистора N-типа и полумост для управления трансформатором. Для уменьшения нежелательных шумов и защиты MOSFET транзисторов мы использовали два диода 1N5819, включенных параллельно MOSFET транзисторам. Для уменьшения возможных нежелательных импульсов, формируемых в секции управления, мы использовали резисторы сопротивлением 4.7 Ом, включенных параллельно диодам 1N4148. И, наконец, транзисторы BD139 и BD 140 включены по двухтактной схеме для управления затворами MOSFET транзисторов потому что MOSFET транзисторы имеют очень большое емкостное сопротивление затвора и требуют как минимум напряжения 10V на своем затворе чтобы работать корректно.
Для лучшего понимания принципов работы представленной схемы на следующем рисунке мы привели ее половину. Рассмотрим случай когда MOSFET транзистор в ней открыт – в этой ситуации ток протекает сначала через трансформатор и затем через MOSFET транзистор замыкается на землю, таким образом, магнитный поток возникает в том же самом направлении, в котором течет ток, поэтому сердечник трансформатора передает этот магнитный поток на вторую обмотку и, таким образом, на выходе мы получаем положительную половину цикла синусоидального сигнала.

В следующем цикле ток течет уже в обратном направлении и, следовательно, магнитный поток возникает в этом же самом направлении, поэтому направление магнитного потока в сердечнике трансформатора также изменяется (по сравнению с предыдущим рассмотренным случаем).

То есть теперь мы знаем, что направление магнитного потока в трансформаторе изменяется. Таким образом, включая и выключая оба MOSFET транзистора (они инвертированы по отношению друг к другу) и осуществляя эти переключения 50 раз в секунду, мы будем формировать изменяющееся магнитное поле в сердечнике трансформатора, следовательно, будет изменяться направление тока во вторичной обмотке трансформатора в соответствии с законом Фараде. В этом и заключается основной принцип работы инвертора.
Теперь на следующем рисунке рассмотрим полную схему чистого синусоидального инвертора на основе платы Arduino.

Как вы видите из представленной схемы, переключение циклов работы выше представленной схемы инвертора будет осуществляться с помощью двух цифровых контактов платы Arduino.
Конструкция проекта
В демонстрационных целях мы собрали схему нашего инвертора на стрипборде (Veroboard). На выходе трансформатора схемы будет протекать огромный ток, поэтому в этом месте коннекторы (соединители) необходимо использовать как можно толще.

Приложения датчиков
Для каждого приложения приводится перечень наиболее часто используемых сенсоров. Много полезной информации по данному вопросу можно найти в руководствах OMEGA® Engineering [1, 2].
В данной статье приведены далеко не все типы аналоговых датчиков, их существует гораздо больше, например:
- счетчики времени/частоты [14];
- дальномеры [25];
- измерительные трансформаторы тока [6].
Информация о поведении электрических характеристик различных сенсоров необходима для правильного выбора оптимальной схемы нормирования.
Датчики электрических характеристик
Данная группа сенсоров (таблица 1) необходима для измерения электрических параметров цепи. Эти датчики используются в различных приложениях, например, для мониторинга критически важных характеристик источников питания.
Таблица 1. Датчики электрических параметров
| Датчик | Выходной сигнал |
| Напряжения | Напряжение |
| Тока | Ток |
| Заряда | Заряд |
Магнитные датчики
Эти датчики (таблица 2) используются для определения напряженности магнитного поля и/или его направления. Они широко применяются в компасах и системах управления электродвигателями [6].
Таблица 2. Магнитные датчики
| Датчик | Выходной сигнал |
| Датчик Холла [6] | Напряжение |
| Магниторезистивный | Сопротивление |
Датчики температуры
Чаще всего датчики температуры используются по прямому назначению, то есть для измерения температуры. Некоторые распространенные виды датчиков температуры перечислены в таблице 3. Обзор датчиков температуры можно найти в документации [14, 15].
Таблица 3. Датчики температуры
| Датчик | Выходной сигнал |
| Термопары [19, 20] | Напряжение |
| Резистивные датчики температуры (RTD) [18] | Сопротивление |
| Термисторы [16, 17] | Сопротивление |
| Интегральные | Напряжение |
| ИК-сенсоры | Ток |
| Термогенераторы (Thermo Piles) | Напряжение |
Датчики влажности
Существуют два основных типа датчиков влажности: емкостные и инфракрасные (таблица 4). Датчики влажности очень часто требуют дополнительной компенсации температурной погрешности.
Таблица 4. Датчики влажности
| Датчик | Выходной сигнал |
| Емкостной | Емкость |
| ИК-датчик | Ток |
Датчики усилия, веса, крутящего момента и давления
Данная группа датчиков используется для измерения механических усилий или деформации. Наиболее распространенные типы датчиков перечислены в таблице 5.
Таблица 5. Датчики усилия, веса, крутящего момента и давления
| Датчик | Выходной сигнал |
| Тензометрические [8, 9, 10] | Сопротивление |
| Тензорезисторы | Сопротивление |
| Пьезоэлектрические | Напряжение или заряд |
| Механические трансдьюсеры | Сопротивление, напряжение и прочее |
Датчики движения и вибрации
Некоторые распространенные аналоговые датчики движения и вибрации представлены в таблице 6. Для решения многих задач могут быть использованы интегральные сенсоры.
Таблица 6. Датчики движения и вибрации
| Датчик | Выходной сигнал |
| Дифференциальные трансформаторы для измерения линейных перемещений LVDT [10] | Переменное напряжение |
| Пьезоэлектрические | Напряжение или заряд |
| Микрофоны | Напряжение |
| Датчики двигателя [6] | Напряжение, сопротивление, ток и так далее |
| Ультразвуковые датчики расстояния [25] | Время |
| Интегральные акселерометры | Напряжение |
Датчики потока
Существуют различные способы измерения скорости потока жидкостей и газов. Краткий перечень датчиков, используемых для решения этой задачи, представлен в таблице 7.
Таблица 7. Датчики потока
| Датчик | Выходной сигнал |
| Магнитные датчики потока | Переменное напряжение |
| Кориолисовы расходомеры | Сопротивление |
| Ультразвуковые/доплеровские датчики | Частота |
| Анемометры с нагреваемым проводом [24] | Сопротивление |
| Механические трансдьюсеры, например, турбины | Напряжение и прочее |
Датчики уровня жидкости и объема
В таблице 8 приведены примеры датчиков уровня жидкости. Объем жидкости в баке известного сечения можно определить по ее уровню.
Таблица 8. Датчики уровня жидкости и объема
| Датчик | Выходной сигнал |
| Ультразвуковые | Время |
| Механические трансдьюсоры | Сопротивление, Напряжение |
| Емкостные | Емкость |
| Механические переключатели | Вкл/Выкл |
| Термальные | Сопротивление |
Датчики света и ИК-излучения
Датчики света и ИК-излучения (таблица 9) используются для обнаружения объектов, в том числе в условиях плохой видимости.
Таблица 9. Датчики света и ИК-излучения
| Датчик | Выходной сигнал |
| Фотодиод [22, 23] | Ток |
Электрохимические датчики
В таблице 10 приводится краткий список электрохимических датчиков, которые применяются для измерения различных химических свойств.
Таблица 10. Электрохимические датчики
| Датчик | Выходной сигнал |
| pH-электрод | Напряжение (большое внутреннее сопротивление) |
| Проводимость | Сопротивление |
| Датчик CO | Напряжение или заряд |
| Датчик мутности (фотодиод) | Ток |
| Колориметр (фотодиод) | Ток |
Необходимые компоненты
Полный список компонентов, необходимых для сборки нашего инвертора, представлен в следующей таблице.
| № п/п | Название | Тип компонента | Количество | Где купить |
| 1 | Atmega328P | микроконтроллер | 1 | |
| 2 | IRFZ44N | Mosfet транзистор | 2 | купить на AliExpress |
| 3 | BD139 | транзистор | 2 | купить на AliExpress |
| 4 | BD140 | транзистор | 2 | купить на AliExpress |
| 5 | 22pF | конденсатор | 2 | купить на AliExpress |
| 6 | 10K,1% | резистор | 1 | купить на AliExpress |
| 7 | 16MHz | кварцевый генератор | 1 | купить на AliExpress |
| 8 | 0.1uF | конденсатор | 3 | купить на AliExpress |
| 9 | 4.7R | резистор | 2 | купить на AliExpress |
| 10 | 1N4148 | диод | 2 | купить на AliExpress |
| 11 | LM7805 | регулятор напряжения | 1 | купить на AliExpress |
| 12 | 200uF,16V | конденсатор | 1 | купить на AliExpress |
| 13 | 47uF, 16V | конденсатор | 1 | купить на AliExpress |
| 14 | 2.2uF,400V | конденсатор | 1 | купить на AliExpress |
Внешний вид этих компонентов показан на следующем рисунке.

Литература
Основные источники
- “The OMEGA® Made in the USA Handbook™,” Vol. 1, OMEGA Engineering, Inc., 2002.
- “The OMEGA® Made in the USA Handbook™,” Vol. 2, OMEGA Engineering, Inc., 2002.
- AN682, “Using Single Supply Operational Amplifiers in Embedded Systems,” Bonnie Baker; Microchip Technology Inc., DS00682, 2000.
- AN866, “Designing Operational Amplifier Oscillator Circuits For Sensor Applications,” Jim Lepkowski; Microchip Technology Inc., DS00866, 2003.
Датчики тока
- AN951, “Amplifying High-Impedance Sensors – Photodiode Example,” Kumen Blake and Steven Bible; Microchip Technology Inc., DS00951, 2004.
- AN894, “Motor Control Sensor Feedback Circuits,” Jim Lepkowski; Microchip Technology Inc., DS00894, 2003.
Резистивные датчики
- AN863, “A Comparator Based Slope ADC,” Joseph Julicher; Microchip Technology Inc., DS00863, 2003.
- AN251, “Bridge Sensing with the MCP6S2X PGAs,” Bonnie C. Baker; Microchip Technology Inc., DS00251, 2003.
- AN717, “Building a 10-bit Bridge Sensing Circuit using the PIC16C6XX and MCP601 Operational Amplifier,” Bonnie C. Baker; Microchip Technology Inc., DS00717, 1999.
- AN695, “Interfacing Pressure Sensors to Microchip’s Analog Peripherals,” Bonnie Baker; Microchip Technology Inc., DS00695, 2000.
- AN512, “Implementing Ohmmeter/Temperature Sensor,” Doug Cox; Microchip Technology Inc., DS00512, 1997.
- AN895 “Oscillator Circuits For RTD Temperature Sensors,” Ezana Haile and Jim Lepkowski; Microchip Technology Inc., DS00895, 2004.
Емкостные датчики
- AN611, “Resistance and Capacitance Meter Using a PIC16C622,” Rodger Richie; Microchip Technology Inc., DS00611, 1997.
Датчики температуры
- AN929, “Temperature Measurement Circuits for Embedded Applications,” Jim Lepkowski; Microchip Technology Inc., DS00929, 2004.
- AN679, “Temperature Sensing Technologies,” Bonnie C. Baker; Microchip Technology Inc., DS00679, 1998.
- AN897; “Thermistor Temperature Sensing with MCP6SX2 PGAs,” Kumen Blake and Steven Bible; Microchip Technology Inc., DS00897, 2004.
- AN685, “Thermistors in Single Supply Temperature Sensing Circuits,” Bonnie C. Baker; Microchip Technology Inc., DS00685, 1999.
- AN687, “Precision Temperature-Sensing With RTD Circuits,” Bonnie C. Baker; Microchip Technology Inc., DS00687, 2003.
- AN684, “Single Supply Temperature Sensing with Thermocouples,” Bonnie C. Baker; Microchip Technology Inc., DS00684, 1998.
- AN844, “Simplified Thermocouple Interfaces and PICmicro® MCUs,” Joseph Julicher; Microchip Technology Inc., DS00844, 2002.
- AN867, “Temperature Sensing With A Programmable Gain Amplifier,” Bonnie C. Baker; Microchip Technology Inc., DS00867, 2003.
Другие датчики
- AN865, “Sensing Light with a Programmable Gain Amplifier,” Bonnie C. Baker; Microchip Technology Inc., DS00865, 2003.
- AN692, “Using a Digital Potentiometer to Optimize a Precision Single-Supply Photo Detection Circuit,” Bonnie C. Baker; Microchip Technology Inc., DS00692, 2004.
- TB044, “Sensing Air Flow with the PIC16C781,” Ward Brown; Microchip Technology Inc., DS91044, 2002.
- AN597, “Implementing Ultrasonic Ranging,” Robert Schreiber; Microchip Technology Inc., DS00597, 1997.
Схемы нормирования
- FilterLab® 2.0 User’s Guide;” Microchip Technology Inc., DS51419, 2003.
- AN942, “Piecewise Linear Interpolation on PIC12/14/16 Series Microcontrollers,” John Day and Steven Bible; Microchip Technology Inc., 2004.
Перевел Вячеслав Гавриков по заказу АО КОМПЭЛ
Тестирование работы инвертора

Для тестирования работы инвертора мы использовали:
- Свинцово-кислотная батарея с напряжением 12V.
- Трансформатор с отводами 6-0-6 и 12-0-12.
- Электрическую лампу на 40 Вт в качестве нагрузки.
- Мультиметр Meco 108B+TRMS.
- Мультиметр Meco 450B+TRMS.
Выходной сигнал с платы Arduino
После загрузки кода в плату Arduino мы измерили SPWM сигнал на двух ее контактах и получили следующую картину:

Если мы увеличим это изображение, то мы увидим каждый изменяющийся полуцикл ШИМ волны.

На следующем рисунке показан сигнал на выходе трансформатора.

Инвертор в идеальном состоянии

Как вы видите на рисунке, в идеальном состоянии схема инвертора потребляет примерно 13 Вт электроэнергии.
Выходное напряжение без нагрузки

Как вы видите, без подсоединённой нагрузки напряжение на выходе инвертора составляет примерно 245 В.
Потребление энергии на входе инвертора

На представленном рисунке вы можете увидеть входную потребляемую мощность при подключенной нагрузке 40 Вт.
Потребление энергии на выходе инвертора

На представленном рисунке вы можете увидеть выходную потребляемую мощность при подключенной нагрузке 40 Вт.
Более подробно все эти процессы вы можете посмотреть на видео, приведенном в конце статьи.
Прямоугольные импульсы: описание и принцип формирования

Искажение импульса проявляется в виде отклонений профиля сигнала от «идеального» профиля. Конечно, искажения напрямую влияют не только на форму, но и на добротность. Например, очень часто системе не хватает скорости отклика, чтобы передать вид точной амплитуды сигнала, которая, в свою очередь, меняется слишком быстро.
В основном искажение выходного сигнала происходит вследствие несовпадения ширины полосы пропускания системы со спектральной шириной выходного сигнала. Этот эффект часто наблюдается, когда входной сигнал представляет собой прямоугольную последовательность импульсов с высокой частотой: тогда искаженный прямоугольный импульс будет иметь округлый вид, как это показано на рисунке 1.
Рисунок 1. Пример явного искажения импульса из-за медленного отклика системы
Промежуточная обработка сигнала также приводит к искажениям. Примером является система, состоящая из драйвера лазерного диода, который принимает входной сигнал от функционального генератора и подает токовый сигнал на лазерный диод. Предполагается, что токовый сигнал является наиболее точным представлением входного сигнала, подаваемого генератором функций.
Так или иначе, любые системы проектируются под минимизацию искажений в выходном сигнале. Все условия выполняются лишь тогда, когда частота входного сигнала находится в пределах указанной полосы пропускания системы (частотного диапазона). Частотный диапазон — важная техническая характеристика, внутри этого диапазона система будет иметь оптимальный отклик.
Тем не менее, собрать систему, скорость отклика которой достаточно высока, по-прежнему непросто и реальные условия диктуют несколько другие правила: когда ширина спектральной полосы входного сигнала превышает предельную частоту всей системы (в данной статье рассматривается система с частотным пределом 750 кГц или 3 дБ) искажения в выходном сигнале становятся наиболее заметны.
В своем лабораторном эксперименте компания Thorlabs исследовала разные прямоугольные последовательности импульсов в системе с предельной частотой 750 кГц. Искажение выходных сигналов анализировалось двумя методами: рассмотрение частотного состава входных и выходных сигналов и сравнение формы входных и выходных импульсов. Это сравнение было необходимо для:
- Исследования зависимости искажения выходного сигнала от параметров последовательности прямоугольных импульсов (частоты, коэффициента заполнения)
- Исследования частотных характеристик сигнала, прошедшего через систему с частотой блокировки 750 кГц
- Разработки подхода для численной оценки добротности прямоугольных выходных импульсов
О прямоугольной последовательности импульсов
Последовательность прямоугольных импульсов состоит из повторяющихся через равные промежутки времени прямоугольных импульсов, по форме чем-то напоминающих шляпу (цилиндр). Прямоугольная форма возникает из-за того, что сигнал резко возрастает от минимального до максимального значения и задерживается в этом положении некоторое время, затем снова возвращаясь к минимальному (см. рис. 2).
Рисунок 2: Последовательность «идеальных» прямоугольных импульсов как функция от времени: Т — период, κ — коэффициент заполнения, Х — максимальная амплитуда
Для генерации прямоугольных импульсов идеальной (а в реальности близкой к ней) формы, сигнал должен мгновенно «перестроиться» от минимального до максимального значения амплитуды. Полное повторение формы импульса через некоторое время называется периодом Т. Ширина импульса или длительность — это промежуток времени, за который сигнал достигает минимальной амплитуды дважды. Неполный коэффициент заполнения κ — это величина, измеряемая в процентах, которая рассчитывается как отношение длительности сигнала к периоду следования импульсов.
Прямоугольная последовательность импульсов может иметь любой коэффициент заполнения от 0 до 1. Как показано на рисунке 2, максимальная амплитуда сигнала равна Х, минимальная — 0.
Если бы форма волны на рисунке 2 была построена как функция частоты, ось частоты продолжалась бы до бесконечности. Для создания идеальной последовательности прямоугольных импульсов требуется дискретная возрастающая последовательность частот, таким образом генерируются бесконечно короткие переходы между амплитудами.
Итак, чтобы получать периодический сигнал прямоугольной формы, необходимо множество частот, превышающих основную частоту сигнала (которая обратна величине периода).
Следствия ограничения пропускательной способности системы
Частотный диапазон системы, как уже говорилось, определяет скорость отклика системы на поданный сигнал. Также можно дать другое определение: частотный диапазон — это самая высокая частота, которую система способна воспринять и обработать. В реальности нет ничего необычного или странного в том, что полоса пропускания системы меньше ширины спектра входного сигнала. Если это несоответствие имеет место быть, более высокочастотные составляющие входного сигнала просто не сохраняются в выходном сигнале, что приводит к искажению профиля импульса.
Если высокочастотные составляющие «отрезаны» из прямоугольной последовательности импульсов, острые углы прямоугольников скругляются, и минимальное время, необходимое для перехода между состояниями низкой и высокой амплитуды, увеличивается. Если отсекается достаточно много высокочастотных компонентов, входная прямоугольная последовательность импульсов преобразуется в синусоидальную волну.
Полоса пропускания: 3 дБ или 750 Гц?
Диапазон частот системы обычно описывается децибелами (дБ) вместо принятых частотных единиц – герц (Гц). В герцах вычисляется абсолютный диапазон, децибелы более удобны на практике. В рассматриваемом исследовании частотный диапазон системы составляет 3 дБ. Точно определить максимальную частоту, выше которой не воспринимает система, может быть достаточно сложно.
Удобно работать с выходным сигналом, состоящим только из частот ниже предельной, в данном случае ниже 3 дБ. В противном случае система будет сильно ослаблять частоты, превышающие порог, однако эти частоты могут по-прежнему вносить вклад в выходной сигнал.
Частота среза 3 дБ в данном исследовании рекомендуется для использования в качестве общего эталона для оценки того, насколько различен частотный состав выходных и входных сигналов.
Экспериментальная установка
Экспериментальная установка показана на рис. 3. Прямоугольные импульсы поступают от функционального генератора в установку, содержащую лазерный диод LP980‐SA80 Thorlabs и контроллер тока и температуры CLD1010LP Thorlabs. Выходной ток, регистрируемый контроллером, содержит установленную пользователем постоянную компоненту. Ток запускает волоконный лазерный диод, установленный в контроллере. Величина постоянной составляющей тока была выбрана таким образом, чтобы общий ток, посылаемый на лазерный диод, всегда превышал пороговый ток генерации. Модулированный таким образом выходной ток на лазерном диоде позволял получать модулированный оптический сигнал.

Рисунок 3. Экспериментальная установка, использованная при исследовании: 1 — контроллер тока и температуры, 2 — лазерный диод, 3 — варьируемый оптический аттенюатор, 4 — фотодетектор, 5 — осциллограф, 6 — функциональный генератор
Далее оптический сигнал попадает на оптоволоконный фотодетектор DET02AFC Thorlabs с FC/PC- коннектором. Фотодетектор подключен к функциональному генератору с частотой 80 МГц. Частота 3 дБ была определена равной 750 кГц . Прямоугольные последовательности импульсов от генератора функций сравнивались с оптическими сигналами на детекторе путем анализа и частотного содержания сигналов, и форм импульсов.
Как частота влияет на искажение формы импульса?
Коэффициент заполнения квадратно-импульсной последовательности в основном составляет 50%, ширина импульса (длительность) в этом случае составляет половину периода. Однако абсолютный период колебаний по-прежнему обратно зависит от частоты.
Квадратные импульсные сигналы с различной частотой также подавались в экспериментальную установку. Измеренные выходные импульсы (некоторые из них изображены на рис. 4) демонстрировали более высокое искажение на частотах, близких частоте среза.
Рисунок 3. Выходные сигналы, зарегистрированные после прохождения через систему с частотой, близкой к частоте среза 3 дБ (соответствует 750 кГц ): пороговая частота почти в 9 раз превышает частоту входного сигнала 83,3 кГц (темно-красный), в результате чего выходной сигнал имеет меньше всего искажений
В ходе эксперимента было выявлено, что при повышении частоты длительность импульса понижается, однако время, за которое выходной сигнал переходит между минимумом и максимумом амплитуд, остается без изменений. Это объясняется тем, что по мере увеличения частоты «боковые стороны» импульсов отклонялись от вертикальной оси. Вершина пульса также стала менее плоской с увеличением частоты. Для крайнего случая, когда частота была равна 3 дБ, выходной сигнал напоминал синусоидальную волну.
При исследовании соотношений между частотой сигнала и частотой среза, было использовано разложение квадратно-импульсной последовательности в ряд Фурье:

Ряд позволяет выполнить разложение прямоугольно-импульсного сигнала в сумму бесконечной последовательности синусоидальных волн. Константа С служит для демонстрации сдвига средней амплитуды квадратичной волны, не влияет на форму импульса. Частота входного сигнала равна частоте первого слагаемого ряда (n = 1). Такая частота еще называется собственной частотой f0. Слагаемые ряда более высоких порядков в прямоугольной волне имеют частоты, кратные нечетному целому числу (n = 3, 5, . ).
Принимая во внимание анализ полученного ряда Фурье, в ходе эксперимента отмечались также некоторые наблюдения:
- Повышение частоты сигнала приводит к увеличению частоты каждого слагаемого в ряду
- Слагаемое первого порядка (n = 1) есть синусоида с максимальной амплитудой
По мере увеличения частоты у некоторых компонентов входного сигнала отмечались частоты ниже предельной. Искажение импульса выходного сигнала было вызвано тем, что компоненты сигнала с частотами выше этого порога были сильно ослаблены системой. В конце эксперимента форма выходного сигнала стала напоминать синусоидальную волну, поскольку все меньше и меньше частотных компонентов имели частоты ниже предельной, их вклад стал незначительным по сравнению с первым слагаемым. Так, когда частота повторений достигла предела, только первая частотная компонента осталась ненулевой.
«Правило девяти» для квадратно-импульсных сигналов
Искажение выходного импульса можно свести к минимуму, если полоса пропускания системы соответствует или превышает ширину спектра входного сигнала. В реальных условиях, когда добиться такого полного соответствия (почти) невозможно, нужно определить минимальный диапазон пропускания системы, при попадании в который выходной сигнал был бы менее всего искажен.
Эмпирическое «правило девяти» может быть хорошим ориентиром для решения многих практических задач. Правило гласит, что полный диапазон пропускания системы должен быть как минимум в девять раз выше частоты входного прямоугольно-импульсного сигнала.
Хотя только «идеальные» прямоугольно-импульсные сигналы имеют коэффициент заполнения 50%, «правило девяти» применимо в случаях, когда коэффициент заполнения близок к 50% (чуть больше или чуть меньше). Однако искажение выходных сигналов с таким коэффициентом заполнения неизбежно. Чтобы приблизить профиль выходного сигнала к идеальному, потребуется увеличить диапазон пропускания как минимум в три раза (воспользоваться правилом).
Основа этого наблюдения лежит в ряде Фурье. Когда частотный предел системы в 9 раз превышает частоту входного сигнала, ряд будет содержать 5 ненулевых частотных компонентов, частота которых ниже предельной. Профиль сигнала для этого случая приведен на рис. 4. Сигнал с частотой 83.3 кГц имеет профиль, который может быть распознан системой как квадратный.
В случае, если ширина диапазона пропускания системы в 3 раза превышает ширину входного сигнала, ряд Фурье содержит уже два ненулевых частотных компонента. То есть для системы диапазоном 750 кГц частота сигнала, подходящего для создания квадратно-импульсной последовательности, составит 250 кГц.
Если подается сигнал, частота которого равна предельной, только первое слагаемое суммы ряда Фурье останется ненулевым. В данном эксперименте подавался сигнал с частотой 750 кГц (соответствующей пороговому значению), на выходе получали синусоидальный профиль.
Влияние на профиль выходного импульсного сигнала снижения коэффициента заполнения (до 20%) обсуждается в следующем разделе.
Как коэффициент заполнения сигнала влияет на профиль и диапазон пропускания системы?
Если частота начального прямоугольно-импульсного сигнала остается постоянной, уменьшение коэффициента заполнения приводит к сокращению ширины импульса*. Уменьшение ширины импульса при неизменной частоте сопровождается более явными искажениями выходного импульса, особенно если ширина полосы пропускания системы меньше ширины спектра сигнала.
Во-первых, качество профиля выходного сигнала ухудшается из-за того, что время перехода между состояниями низкой и высокой амплитуд состояний растет.
Во-вторых, сигналу требуется меньше времени для стабилизации высокой амплитуды, прежде чем перейти к амплитуде в низком состоянии, это также провоцирует «расплывание».
На рисунке 5 показан набор профилей импульсов, измеренных на выходе экспериментальной установки, когда входной сигнал имел коэффициент заполнения 20%.
Рисунок 5. Кривые амплитуд выходных сигналов с указанной частотой каждого из них: в этой части эксперимента коэффициент заполнения снижен до 20%, снижение коэффициента заполнения особенно повлияло на профиль импульса сигнала частотой 83.3 кГц (см. рис. 3)
Профиль импульса был узнаваемо прямоугольным для частоты повторений 83.3 кГц, когда ширина полосы пропускания системы была примерно в девять раз больше ширины спектра входного сигнала. Когда частота входного сигнала составляла 200 кГц, диапазон пропускания системы превышал частоту входного сигнала в три раза, однако выходной импульс имел уже синусоидальную форму из-за снижения коэффициента заполнения импульса. В предыдущем опыте он составлял 50%, тогда еще более высокая частота входного сигнала (250 кГц) позволяла получать прямоугольный профиль выходного сигнала.
* Время, в течение которого сигнал находится в состоянии высокой амплитуды.
Сравнение коэффициентов заполнения входного и выходного сигналов
Увеличение частоты входного импульсного сигнала, коэффициент заполнения импульса которого не равен 50%, вызывает искажения в профиле выходного сигнала. В результате можно получить такой сигнал, коэффициент заполнения импульса которого и составляет 50%.
Демонстрация этой тенденции для установки с пределом пропускания 750 кГц, описанной в работе ранее, представлена на рисунке 6.
Рисунок 6. Кривые коэффициентов заполнения входного и выходного импульсного сигналов по мере увеличения частоты вплоть до порогового значения 750 кГц: высокочастотные компоненты урезаны, коэффициент заполнения выходного сигнала составил 50 %
Для частот 200 — 300 кГц коэффициенты заполнения импульса входного и выходного сигналов примерно одинаковы. Различия в коэффициентах заполнения импульсов выходного и входного сигналов начали проявляться, когда пропускательная способность системы была в 3-4 раза выше частоты начального импульсного сигнала. При более высоких частотах коэффициент заполнения импульсов приближался к 50%.
Этот эффект обусловлен тем, что основная частотная составляющая входного сигнала (собственная частота) является графиком синусоиды. Синусоидальные волны имеют коэффициент заполнения 50%, а высокочастотные составляющие необходимы для преобразования формы волны в сигнал с желаемым коэффициентом заполнения. Увеличение частоты начального импульсного сигнала приводит к увеличению числа ненулевых компонентов в ряде Фурье, частоты которых превышают предел системы (3 дБ). Поскольку эти высокочастотные компоненты практически полностью режутся в системе, в выходном сигнале преобладает основная частотная составляющая.
Количественное измерение искажений
Оценка добротности сигнала необходима для прогнозирования и расчета номинального искажения импульса и допустимых параметров. Популярным методом оценки искажений сигнала является преобразование Фурье: на практике часто анализируют и обрабатывают последовательности, полученные через разложение в ряд исходного сигнала. С помощью преобразования Фурье получают «идеальные» импульсные последовательности сигналов с прямоугольным профилем, а затем сравнивают фактические данные. Сравниваются главным образом длительности реального и «идеального» импульсов.
На рис. 7 показан период идеального прямоугольного импульса (зеленый) и период синусоиды (синий). Синусоида – первое слагаемое в сумме ряда Фурье этого импульсного сигнала. Пунктирные линии демонстрируют «расплывание».
Рисунок 7. Прямоугольно-импульсный сигнал (зеленый) и синусоидальный (синий) имеют ширину спектральной полосы, равную 0.5Т: пунктирные линии показывают переходы от низкого к высокому состоянию амплитуды, для прямоугольной волны переход является бесконечно коротким и время пребывания в каждом состоянии равно 0.5T, для синусоидального сигнала верно обратное
Добротность сигнала – это шкала от 0 до 1, единица описывает импульсы с идеальными прямоугольными профилями с бесконечно малым временем перехода между минимальной и максимальной амплитудами. Ноль соответствует сигналам, время перехода от максимальной до минимальной амплитуды которых будет равно длительности идеального прямоугольного импульса. Например, синусоидальный импульс на рисунке 7 имеет нулевой коэффициент добротности, поскольку его время перехода от минимума до максимума составляет половину периода и равно ширине идеального прямоугольного импульса.
Шумы и частотная нестабильность затрудняют снятие точных измерений времени перехода между амплитудами у реальных сигналов. Вместо этого обычно производится измерение времени, необходимого для перехода от точки, немного превышающей минимальную амплитуду, в другую точку, немного ниже максимальной амплитуды. Обычно это точки расположены на уровне 10% и 90% по шкале амплитуды вверх по переднему фронту. Коэффициент добротности Г рассчитывается через время нарастания импульса τr, а также ширину идеального прямоугольного импульса W:

Измерение добротности сигнала
Синяя кривая на рисунке 8 показывает коэффициенты добротности, рассчитанные для выходных импульсов, когда входные сигналы имели 50% коэффициент заполнения и частоты между 25 кГц и 750 кГц.
Рисунок 8. Периодические прямоугольные последовательности импульсов поступали в экспериментальную установку с предельной частотой 750 кГц, для каждого сигнала рассчитывались коэффициенты качества выходных сигналов*, две кривые, полученные в опытах, где коэффициент заполнения импульсов составлял 80%, показали наиболее высокое качество выходного сигнала (линии, соединяющие точки данных, построены для наглядности)
* Кривые коэффициентов заполнения приводятся с отметкой «High» или «Low». Это указывает на то, как именно проводился сравнительный анализ: в верхнем или нижнем амплитудном состоянии соответственно.
Показатель добротности, рассчитанный для случая частоты входного сигнала 83.3 кГц, составил 0.87, что достаточно высоко. Серия опытов с сигналами такой частоты как раз осуществлялась по «правилу девяти», о котором говорится выше.
Коэффициент добротности 0.58, рассчитанный для частоты 250 кГц при коэффициенте заполнения 50% подтверждает следующее качественное наблюдение: несмотря на некоторое искажение импульса в выходном сигнале, профиль импульса был скорее прямоугольным, чем синусоидальным, даже если только две частотные компоненты ряда Фурье входного сигнала лежали в пределах полосы пропускания системы.
Когда частота повторения составила 750 кГц, выходной сигнал оказался синусоидальным, а добротность при этом была нулевой.
Показатели добротности для случая коэффициента заполнения 20% показаны красным цветом.
Коэффициент добротности 0.68 сигнала с частотой 83.3 кГц соответствует прямоугольному профилю выходной последовательности импульсов. Однако прослеживается больше искажений профиля, чем в предыдущем пункте, когда коэффициент заполнения составлял 50%.
Опыт показывает, что уменьшение коэффициента заполнения при сохранении частоты повторения приводит к увеличению искажений профиля выходного сигнала. Чтобы повысить коэффициент добротности до 0.87, частоту сигнала с коэффициентом заполнения 20% необходимо снизить приблизительно до 33 кГц.
Когда частота сигнала с коэффициентом заполнения 20% была увеличена до 250 кГц, добротность стала равна нулю. Дальнейшее увеличение частоты сигнала с коэффициентом заполнения 20% привело к отрицательным показателям добротности. Физически это означает, что время нарастания было больше, чем ширина входного импульса. При таком сигнале добиться приемлемой точности при дальнейшей обработке крайне сложно.
Зеленая кривая (80% High) демонстрирует следующее: если коэффициент заполнения входного сигнала превышает 50%, минимальная добротность является уже положительной. Поскольку шкала в этой серии начинается не от нуля, показатели добротности трудно сравнить с другими значениями коэффициента заполнения.
Кроме того, добротность, рассчитанная по высокоамплитудной части импульса, низкоамплитудную составляющую не учитывает, как не учитываются и все содержащиеся в ней искажения. В таком случае можно рассчитать добротность при минимальной амплитуде. Эти альтернативные данные отмечены желтым и, как ожидалось, напоминали кривые, полученные для сигналов с коэффициентом заполнения 20%.
Показатели добротности, показанные на рисунке 8, отображают влияние ширины импульса, частоты и коэффициента заполнения входного сигнала на профиль выходного сигнала. Когда другие параметры неизменны, искажение выходного сигнала может возрасти по следующим причинам:
- Повышение частоты
- Снижение коэффициента заполнения импульса
- Уменьшение диапазона пропускания системы
Компания INSCIENCE помогает своим заказчикам решать любые вопросы и потребности по продукции Thorlabs на территории РФ
Получение прямоугольных импульсов из синусоидального напряжения (рис. 4.43)
Схема представляет собой ограничитель синусоидального сигнала, выполненный на базе стабилитрона.
В качестве понижающего трансформатора можно использовать унифицированный трансформатор кадровой развертки телевизоров ТВК-110ЛМ. На его обмотке имеется напряжение амплитудой около 20 В. Во время положительного полупериода напряжения на вторичной обмотке трансформатора стабилитрон выполняет свою основную функцию, в результате чего на его выводах можно наблюдать с помощью осциллографа ограниченную сверху полуволну синусоиды.

Амплитуда прямоугольного импульса зависит от напряжения стабилизации стабилитрона. Во время отрицательного полупериода сину-
Рис. 4.43. Получение прямоугольных соидального напряжения на вто-импульсов из синусоидального ричной обмотке трансформатора
напряжения стабилитрон работает как обычный
диод, падение напряжения на нем будет составлять доли вольта. В итоге на выходе схемы будет сигнал прямоугольной формы, «основание» которого немного (доли вольта) смещено вниз относительно линии развертки (осциллограф работает в режиме открытого входа).
Балластный резистор R1 выбирается из условия, чтобы максимальный ток через стабилитрон был больше 1мии и меньше 1макс.
Стабилитрон — ограничитель постоянного напряжения (рис. 4.44)
Представьте ситуацию, когда вашему транзисторному приемнику требуется питание, скажем, 9 В, а в распоряжении есть блок питания с фиксированным напряжением 15 В. Как быть?
Конечно, первая мысль — включить в цепь питания постоянный резистор, гасящий излишек напряжения. Но такой способ неприемлем из-за того, что в зависимости от громкости звука будет изменяться потребляемый приемником ток, а значит, и напряжение на нем.
Если же вместо гасящего резистора включить в цепь питания стабилитрон (см. рисунок), проблема будет решена. Теперь напряжение на нагрузке (приемнике) станет равным разности напряжений блока питания и стабилизации стабилитрона. В этом легко убедиться с помощью вольтметра постоянного тока.
Поскольку у разных экземпляров стабилитронов может отличаться напряжение стабилизации, более точно (если это нужно)
- 15В 9В
- — —
Рис. 4.44. Стабилитрон — ограничитель постоянного напряжения
выходное напряжение можно подобрать включением диода VD2 последовательно со стабилитроном. Тогда общее «гасящее» напряжение составит сумму напряжений стабилизации и прямого для данного диода. В свою очередь диод ставят либо германиевый (у него прямое напряжение может быть около 0,5 В), либо кремниевый (до 1,2 В), либо два-три последовательно соединенных диода.
Можно также соединять последовательно несколько стабилитронов (даже с разными напряжениями стабилизации) для получения нужного «гасящего» напряжения.
При выборе диодов и стабилитронов следует учитывать, чтобы ток нагрузки не превышал максимального значения выпрямленного тока для каждого диода и максимальный ток стабилизации для каждого стабилитрона. И еще следует помнить, что стабилитрон следует включать в обратном направлении, а диод — в прямом.