§ 29.3. Двигатель параллельного возбуждения
Схема включения в сеть двигателя параллельного возбуждения показана на рис. 29.3, а. Характерной особенностью этого двигателя является то, что ток в обмотке возбуждения (ОВ) не зависит от тока нагрузки (тока якоря). Реостат в цепи возбуждения служит для регулирования тока в обмотке возбуждения и магнитного потока главных полюсов.
Эксплуатационные свойства двигателя определяются его рабочими характеристиками, под которыми понимают зависимость частоты вращения n, тока I, полезного момента M2, вращающего момента M от мощности на валу двигателя Р2 при и (рис. 29.3, 6).
Для анализа зависимости и , которую обычно называют скоростной характеристикой, обратимся к формуле (29.5), из которой видно, что при неизменном напряжении U на частоту вращения влияют два фактора: падение напряжения в цепи якоря и поток возбуждения Ф. При увеличении нагрузки уменьшается числитель , при этом вследствие реакции якоря уменьшается и знаменатель Ф. Обычно ослабление потока, вызванное реакцией якоря, невелико и первый фактор влияет на частоту вращения сильнее, чем второй. В итоге частота вращения двигателя с ростом нагрузки Р2 уменьшается, а график приобретает падающий вид с небольшой выпуклостью, обращенной к оси абсцисс. Если же реакция якоря в двигателе сопровождается более значительным ослаблением потока Ф, то частота вращения с увеличением нагрузки будет возрастать, как это показано штриховой кривой на рис. 29.3, б. Однако такая зависимость является нежелательной, так как она, как правило, не удовлетворяет условию устойчивой работы двигателя: с ростом нагрузки на двигатель возрастает частота вращения, что ведет к дополнительному росту нагрузки и т. д., т. е. частота вращения n двигателя неограниченно увеличивается и двигатель идет «в разнос». Чтобы обеспечить характеристике частоты вращения форму падающей кривой, в некоторых двигателях параллельного возбуждения применяют легкую (с небольшим числом витков) последовательную обмотку возбуждения, которую называют стабилизирующей обмоткой. При включении этой обмотки согласованно с параллельной обмоткой возбуждения ее МДС компенсирует размагничивающее действие реакции якоря так, что поток Ф во всем диапазоне нагрузок остается практически неизменным.

Рис. 29.3. Схема двигателя параллельного возбуждения ( )
и его рабочие характеристики ( )
Изменение частоты вращения двигателя при переходе от номинальной нагрузки к х.х., выраженное в процентах, называют номинальным изменением частоты вращения:
где — частота вращения двигателя в режиме х.х.
Обычно для двигателей параллельного возбуждения , поэтому характеристику частоты вращения двигателя параллельного возбуждения называют жесткой.
Зависимость полезного момента от нагрузки установлена формулой . При график имел бы вид прямой. Однако с увеличением нагрузки частота вращения двигателя снижается, и поэтому зависимость криволинейна.
При вращающий момент двигателя . Так как рабочие характеристики двигателя строят при условии , что обеспечивает постоянство магнитных потерь в двигателе, то момент х.х. . Поэтому график зависимости проходит параллельно кривой Если принять поток , то график является в то же время выражением зависимости ,так как .
Для получения аналитического выражения механической характеристики преобразуем выражение (29.5):
подставив в него из (25.24) значение тока якоря
где — частота вращения в режиме х.х.; — изменение частоты вращения, вызванное изменением нагрузки на валу двигателя.
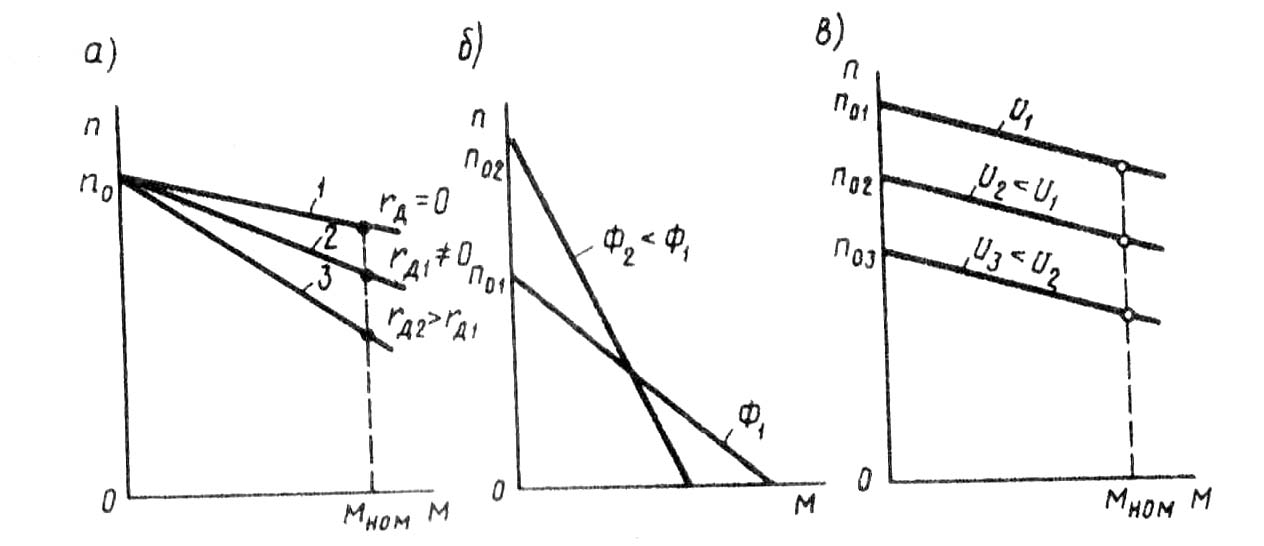
Рис. 29.4. Механические характеристики двигателя параллельного возбуждения:
а — при введении в цепь якоря добавочного сопротивления;
б — при изменении основного магнитного потока;
в — при изменении напряжения в цепи якоря
Если пренебречь реакцией якоря, то (так как ) можно принять . Тогда механическая характеристика двигателя параллельного возбуждения представляет собой прямую линию, несколько наклоненную к оси абсцисс (рис. 29.4, а). Угол наклона механической характеристики тем больше, чем больше значение сопротивления, включенного в цепь якоря. Механическую характеристику двигателя при отсутствии дополнительного сопротивления в цепи якоря называют естественной (прямая 1). Механические характеристики двигателя, полученные при введении дополнительного сопротивления в цепь якоря, называют искусственными (прямые 2 и 3).
Вид механической характеристики зависит также и от значения основного магнитного потока Ф. Так, при уменьшении Ф увеличивается частота вращения х.х. и одновременно увеличивается , т. е. увеличиваются оба слагаемых уравнения (29.11). Это приводит к резкому увеличению наклона механической характеристики, т. е. к уменьшению ее жесткости (рис. 29.4, б).
При изменении напряжения на якоре U меняется частота вращения , а остается неизменной. В итоге жесткость механической характеристики (если пренебречь влиянием реакции якоря) не меняется (рис. 29.4, в), т. е. характеристики смещаются по высоте, оставаясь параллельными друг другу.
Регулировочная характеристика.
Регулировочная характеристика n=f(Iв) двигателя параллельного возбуждения изображена на рис. 1.29.
Ее характер определяется зависимостью (1.5), из которой следует, что частота вращения обратно пропорциональна магнитному потоку и, следовательно, току возбуждения Iв. При токе возбуждения Iв= 0, что может быть при обрыве цепи возбуждения, магнитный поток равен остаточному Фост и частота вращения становится настолько большой, что двигатель может механически разрушиться, – подобное явление называется разносом двигателя.
Физически явление разноса объясняется тем, что вращающий момент (1.2) при уменьшении магнитного потока, казалось бы, должен уменьшиться, однако ток якоря Iя = (U – E)/Rя увеличивается значительнее, так как уменьшается Е (1.1) и разность U – E увеличивается в большей степени (обычно Е» 0,9 U).
Тормозные режимы.
Тормозные режимы двигателя имеют место тогда, когда электромагнитный момент, развиваемый двигателем, действует против направления вращения якоря. Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
У двигателя параллельного возбуждения возможны три тормозных режима: генераторное торможение с возвратом энергии в сеть, торможение противовключением и динамическое торможение.
Генераторное торможение возникает в тех случаях, когда частота вращения якоря n становится больше частоты вращения при идеальном (т.е. при Мпр = 0) холостом ходе nx (n>nx). Переход в этот режим из режима двигателя возможен, например, при спуске груза, когда момент, создаваемый грузом, приложен к якорю в том же направлении, что и электромагнитный момент двигателя, т.е. тогда, когда момент нагрузки действует согласно с электромагнитным моментом двигателя и он набирает скорость, большую чем nx. Если n>nx, то Е>Uc (где Uc – напряжение сети) и ток двигателя изменяет свой знак (1.4) – электромагнитный момент из вращающего становится тормозным, а машина из режима двигателя переходит в режим генератора и отдает энергию в сеть (рекуперация энергии). Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
Торможение противовключением возникает в работающем двигателе, когда направление тока в якоре или тока возбуждения переключается на противоположное. Электромагнитный момент при этом изменяет знак и становится тормозным.
Работе двигателя с противоположным направлением вращения соответствуют механические характеристики, располагающиеся в квадрантах II и III (например, естественная характеристика 2 на рис. 1.30).
Внезапный переход на эту характеристику практически недопустим, так как сопровождается чрезмерно большим броском тока и тормозного момента. По этой причине одновременно с переключением одной из обмоток в цепь якоря включается добавочное сопротивление Rдоб,ограничивающее ток якоря.
Механическая характеристика режима с Rдоб имеет большой наклон (прямая 3). При переходе в режим противовключения частота вращения n в первый момент измениться не может (из-за инерционности якоря) и рабочая точка из положения a1 перейдет в положение a3 на новой характеристике. Из-за появления Мтор частота вращения n будет быстро падать до тех пор, пока рабочая точка a3 не перейдет в положение a4, соответствующее остановке двигателя. Если в этот момент двигатель не отключить от источника питания, то якорь изменит направление вращения. Машина начнет работать в двигательном режиме с новым направлением вращения, а ее рабочая точка a5 будет находиться на механической характеристике 3 в квадранте III.
Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
что соответствует семейству прямых 4 (при разных Rд.т), проходящих через начало координат. При переключении в этот режим рабочая точка a1 переходит на одну из характеристик 4, например, в точку a6, а затем перемещается по прямой 4 до нуля. Якорь двигателя тормозится до полной остановки. Изменением сопротивления Rд.т можно регулировать ток якоря и скорость торможения.
24) Двигатель постоянного тока последовательного возбуждения представляет собой электрическую машину постоянного тока, в которой обмотка возбуждения подключена последовательно с обмоткой якоря. Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен току в обмотке возбуждения I=Iв=Iя, что является его главной отличительной особенностью от остальных типов двигателей.

Рисунок 1 – Схема подключения ДПТ ПВ
Стоит обратить внимание на зависимость магнитного потока от нагрузки Ф=f(Iя). Если двигатель будет работать на 25% своей номинальной мощности или меньше, то магнитный поток будет крайне мал, что приведет к постоянному увеличению скорости вала. Препятствовать разгону будут лишь механические потери, и двигатель пойдет в "разнос". Это приведет к быстрому выходу машины из строя. Все описанное в соответствии с формулой:
 |
Исходя из вышесказанного, ДПТ ПВ нельзя использовать на холостом ходу, постоянно требуется контроль тока якоря. С этой целью последовательно с обмоткой возбуждения устанавливают минимальное токовое реле, которое замыкает якорную цепь только в том случае, если нагрузка на валу достаточна для поддержания номинальной работы двигателя.
Пуск двигателя производят с пусковым сопротивлением, также включенным последовательно в цепь якоря. После пуска это сопротивление выводят, и машина продолжает работать в номинальном режиме на своей естественной характеристике.
Механическая и электромеханическая характеристики ДПТ ПВ одинаковы и имеют гиперболический вид (рисунок 2).
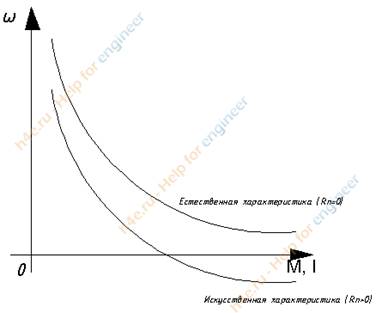
Рисунок 2 – Механическая и электромеханическая характеристики ДПТ ПВ
Скорость вращения ротора двигателя постоянного тока с последовательным возбуждением производится регулированием двух параметров:
| — питающее напряжение; |
| — магнитный поток полюсов двигателя. |
Для изменения скорости при помощи входного напряжения, в роторную цепь вводят специальное добавочное сопротивление, или же можно использовать пусковой реостат и для этой цели. Но следует заметить, данный способ является крайне неэкономичным и нецелесообразным, так как большое количество энергии будет рассеиваться на реостате.
Регулировка скорости изменением магнитного потока, осуществляется включением реостата параллельно обмотке возбуждения. Изменяя сопротивление – меняем ток, протекающий через обмотку возбуждения. Иногда обмотку возбуждения разбивают на несколько параллельных секций. В некоторых типах двигателей предусмотрена возможность отключения витков обмотки, так добиваются того же эффекта регулирования.
Тормозные режимы
В данном двигателе отсутствует режим генераторного торможения с отдачей энергии в сеть. На рисунке 2 вы можете видеть, что ветка гиперболы естественной характеристики не пересекает ось ординат (отрицательная скорость отсутствует).
Торможение противовключением получают путем переключения выводов якорной обмотки.
ДПТ ПВ нельзя соединять с механизмом при помощи ременной передачи, так как соскакивание или разрыв ремня приведет к разгрузке двигателя, что вызовет мгновенное повышение числа оборотов и последующему выходу из строя.
ДПТ ПВ нашли свое основное применение в качестве тяговых двигателей подвижного состава электровозов общего назначения, электровозов метрополитена и в трамваях.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Почему регулировочная характеристика двигателя параллельного возбуждения криволинейна
Двигатель параллельного возбуждения получил свое название от способа включения цепи возбуждения. Его обмотка возбуждения включается параллельно якорю. Для изменения магнитного потока последовательно с обмоткой возбуждения включают регулировочный реостат R. (рис. 7.14.1).

Изменяя сопротивление регулировочного реостата, можно изменить ток возбуждения В момент включения двигателя магнитный поток должен быть максимальным, а, следовательно, сопротивление реостата уменьшено до нуля.
Пусковой реостат ПР включают последовательно с якорем. Конструкция пускового реостата должна обеспечивать замыкание цепи возбуждения на якорь при отключении двигателя, так как обмотка возбуждения имеет много витков и обладает значительной индуктивностью. В противном случае при разрыве цепи возбуждения возникает большая ЭДС самоиндукции и может произойти пробой изоляции витков обмотки возбуждения. Из рисунка 7.14.1 видно, что противоЭДС после отключения двигателя (перевода ползунка на холостой контакт хк) поддерживает ток в обмотке возбуждения и этот ток будет убывать постепенно по мере уменьшения скорости вращения якоря.
Если пренебречь реакцией якоря, то механическая характеристика двигателя параллельного возбуждения, определяемая уравнением (7.13.2), представляет собой падающую прямую, угол наклона которой зависит от величины Rя и возрастает с ростом последней (рис. 7.14.2). С увеличением нагрузки частота вращения двигателя изменяется мало, так как напряжение на зажимах двигателя следует считать неизменным, а падение напряжения на якоре мало изменяется с ростом нагрузки в силу малого значения сопротивления якоря. Такая механическая характеристика называется “жесткой”. Реакция якоря, которая выражается в уменьшении магнитного потока, несколько изменяет форму характеристики и способствует увеличению числа оборотов якоря, т.е. делает характеристику более “жесткой”.
Зависимость скорости вращения двигателя от тока возбуждения при вращении вхолостую и постоянном напряжении называется регулировочной характеристикой холостого хода:

Эта характеристика показана на рисунке 7.14.3.


При сильном уменьшении тока возбуждения ток якоря и частота вращения ненагруженного двигателя резко возрастают, усиливается искрение щеток и появляется опасность механических повреждений якоря. Это явление недопустимо, и потому современные двигатели снабжают автоматической защитой, отключающей их от сети при чрезмерном уменьшении тока возбуждения.
Обычно во всех каталогах приводятся рабочие характеристики электродвигателя. Рабочие характеристики двигателя снимаются при постоянном напряжении и постоянном токе возбуждения, и они представляют собой зависимости п, М, /, Р от полезной мощности на валу двигателя:

Зависимость момента Мот мощности нагрузки на валу двигателя может быть представлена прямой линией, проходящей через начало координат, только при условии постоянства скорости вращения (Р2 = wM). Но с ростом нагрузки уменьшается частота вращения вала двигателя и момент растет несколько быстрее, чем это следует из линейного закона.
В силу малого значения потерь в двигателе ток растет с ростом нагрузки почти по линейному закону. При холостом ходе, когда Р2 = 0, ток двигателя больше нуля. Поэтому кривая начинается выше начала координат на величину тока холостого хода.
Двигатель параллельного возбуждения не только имеет “жесткую” механическую характеристику, но он позволяет плавно, экономично и в широких пределах изменять скорость вращения. Регулирование скорости вращения производится исключительно изменением тока возбуждения, который составляет 1. 7% от /„, а потери энергии в регулировочном реостате РВ (см. рис. 7.14.1) очень малы.
Регулировочная характеристика двигателя показывает, как надо изменять с ростом нагрузки ток возбуждения, чтобы частота двигателя оставалась неизменной при постоянном напряжении на его зажимах.
Регулировать скорость вращения, как уже отмечалось, возможно и включением добавочного сопротивления последовательно с якорем, но этот способ неэкономичен и применяется редко.
Электродвигатели с параллельным возбуждением используют там, где нужна практически постоянная частота вращения при колебаниях нагрузки (например, металлорежущие станки), или там, где требуется плавное изменение скорости в широких пределах.
§ 29.3. Двигатель параллельного возбуждения
Схема включения в сеть двигателя параллельного возбуждения показана на рис. 29.3, а. Характерной особенностью этого двигателя является то, что ток в обмотке возбуждения (ОВ) не зависит от тока нагрузки (тока якоря). Реостат в цепи возбуждения  служит для регулирования тока в обмотке возбуждения и магнитного потока главных полюсов.
служит для регулирования тока в обмотке возбуждения и магнитного потока главных полюсов.
Эксплуатационные свойства двигателя определяются его рабочими характеристиками, под которыми понимают зависимость частоты вращения n, тока I, полезного момента M2, вращающего момента M от мощности на валу двигателя Р2 при  и
и (рис. 29.3,6).
(рис. 29.3,6).
Для анализа зависимости и  , которую обычно называют скоростной характеристикой, обратимся к формуле (29.5), из которой видно, что при неизменном напряженииU на частоту вращения влияют два фактора: падение напряжения в цепи якоря
, которую обычно называют скоростной характеристикой, обратимся к формуле (29.5), из которой видно, что при неизменном напряженииU на частоту вращения влияют два фактора: падение напряжения в цепи якоря  и поток возбужденияФ. При увеличении нагрузки уменьшается числитель
и поток возбужденияФ. При увеличении нагрузки уменьшается числитель  , при этом вследствие реакции якоряуменьшается и знаменатель Ф. Обычно ослабление потока, вызванное реакцией якоря, невелико и первый фактор влияет на частоту вращения сильнее, чем второй. В итоге частота вращения двигателя с ростом нагрузки Р2 уменьшается, а график
, при этом вследствие реакции якоряуменьшается и знаменатель Ф. Обычно ослабление потока, вызванное реакцией якоря, невелико и первый фактор влияет на частоту вращения сильнее, чем второй. В итоге частота вращения двигателя с ростом нагрузки Р2 уменьшается, а график  приобретает падающий вид с небольшой выпуклостью, обращенной к оси абсцисс. Если же реакция якоря в двигателе сопровождается более значительным ослаблением потокаФ, то частота вращения с увеличением нагрузки будет возрастать, как это показано штриховой кривой на рис. 29.3, б. Однако такая зависимость
приобретает падающий вид с небольшой выпуклостью, обращенной к оси абсцисс. Если же реакция якоря в двигателе сопровождается более значительным ослаблением потокаФ, то частота вращения с увеличением нагрузки будет возрастать, как это показано штриховой кривой на рис. 29.3, б. Однако такая зависимость  является нежелательной, так как она, как правило, не удовлетворяет условию устойчивой работы двигателя: с ростом нагрузки на двигатель возрастает частота вращения, что ведет к дополнительному росту нагрузки и т. д., т. е. частота вращения n двигателя неограниченно увеличивается и двигатель идет «в разнос». Чтобы обеспечить характеристике частоты вращения форму падающей кривой, в некоторых двигателях параллельного возбуждения применяют легкую (с небольшим числом витков) последовательную обмотку возбуждения, которую называют стабилизирующей обмоткой. При включении этой обмотки согласованно с параллельной обмоткой возбуждения ее МДС компенсирует размагничивающее действие реакции якоря так, что поток Ф во всем диапазоне нагрузок остается практически неизменным.
является нежелательной, так как она, как правило, не удовлетворяет условию устойчивой работы двигателя: с ростом нагрузки на двигатель возрастает частота вращения, что ведет к дополнительному росту нагрузки и т. д., т. е. частота вращения n двигателя неограниченно увеличивается и двигатель идет «в разнос». Чтобы обеспечить характеристике частоты вращения форму падающей кривой, в некоторых двигателях параллельного возбуждения применяют легкую (с небольшим числом витков) последовательную обмотку возбуждения, которую называют стабилизирующей обмоткой. При включении этой обмотки согласованно с параллельной обмоткой возбуждения ее МДС компенсирует размагничивающее действие реакции якоря так, что поток Ф во всем диапазоне нагрузок остается практически неизменным.

Рис. 29.3. Схема двигателя параллельного возбуждения ( )
)
и его рабочие характеристики ( )
)
Изменение частоты вращения двигателя при переходе от номинальной нагрузки к х.х., выраженное в процентах, называют номинальным изменением частоты вращения:
 , (29.8)
, (29.8)
где  — частота вращения двигателя в режиме х.х.
— частота вращения двигателя в режиме х.х.
Обычно для двигателей параллельного возбуждения  , поэтому характеристику частоты вращения двигателя параллельного возбуждения называют жесткой.
, поэтому характеристику частоты вращения двигателя параллельного возбуждения называют жесткой.
Зависимость полезного момента  от нагрузки установлена формулой
от нагрузки установлена формулой  . При
. При  график
график  имел бы вид прямой. Однако с увеличением нагрузки частота вращения двигателя снижается, и поэтому зависимость
имел бы вид прямой. Однако с увеличением нагрузки частота вращения двигателя снижается, и поэтому зависимость  криволинейна.
криволинейна.
При  вращающий момент двигателя
вращающий момент двигателя . Так как рабочие характеристики двигателя строят при условии
. Так как рабочие характеристики двигателя строят при условии  , что обеспечивает постоянство магнитных потерь в двигателе, то момент х.х.
, что обеспечивает постоянство магнитных потерь в двигателе, то момент х.х.  . Поэтому график зависимости
. Поэтому график зависимости  проходит параллельно кривой
проходит параллельно кривой  Если принять поток
Если принять поток  , то график
, то график  является в то же время выражением зависимости
является в то же время выражением зависимости  ,так как
,так как  .
.
Для получения аналитического выражения механической характеристики  преобразуем выражение (29.5):
преобразуем выражение (29.5):
 ; (29.9)
; (29.9)
подставив в него из (25.24) значение тока якоря
 , (29.10)
, (29.10)
 , (29.11)
, (29.11)
где  — частота вращения в режиме х.х.;
— частота вращения в режиме х.х.; — изменение частоты вращения, вызванное изменением нагрузки на валу двигателя.
— изменение частоты вращения, вызванное изменением нагрузки на валу двигателя.

Рис. 29.4. Механические характеристики двигателя параллельного возбуждения:
а — при введении в цепь якоря добавочного сопротивления;
б — при изменении основного магнитного потока;
в — при изменении напряжения в цепи якоря
Если пренебречь реакцией якоря, то (так как  ) можнопринять
) можнопринять  . Тогда механическая характеристика двигателя параллельного возбуждения представляет собой прямую линию, несколько наклоненную к оси абсцисс (рис. 29.4, а). Угол наклона механической характеристики тем больше, чем больше значение сопротивления, включенного в цепь якоря. Механическую характеристику двигателя при отсутствии дополнительного сопротивления в цепи якоря называют естественной (прямая 1). Механические характеристики двигателя, полученные при введении дополнительного сопротивления в цепь якоря, называют искусственными (прямые 2 и 3).
. Тогда механическая характеристика двигателя параллельного возбуждения представляет собой прямую линию, несколько наклоненную к оси абсцисс (рис. 29.4, а). Угол наклона механической характеристики тем больше, чем больше значение сопротивления, включенного в цепь якоря. Механическую характеристику двигателя при отсутствии дополнительного сопротивления в цепи якоря называют естественной (прямая 1). Механические характеристики двигателя, полученные при введении дополнительного сопротивления в цепь якоря, называют искусственными (прямые 2 и 3).
Вид механической характеристики зависит также и от значения основного магнитного потока Ф. Так, при уменьшении Ф увеличивается частота вращения х.х.  и одновременно увеличивается
и одновременно увеличивается  , т. е. увеличиваются оба слагаемых уравнения (29.11). Это приводит к резкому увеличению наклона механической характеристики, т. е. к уменьшению ее жесткости (рис. 29.4, б).
, т. е. увеличиваются оба слагаемых уравнения (29.11). Это приводит к резкому увеличению наклона механической характеристики, т. е. к уменьшению ее жесткости (рис. 29.4, б).
При изменении напряжения на якоре U меняется частота вращения  , а
, а остается неизменной. В итоге жесткость механической характеристики (если пренебречь влиянием реакции якоря) не меняется (рис. 29.4, в), т. е. характеристики смещаются по высоте, оставаясь параллельными друг другу.
остается неизменной. В итоге жесткость механической характеристики (если пренебречь влиянием реакции якоря) не меняется (рис. 29.4, в), т. е. характеристики смещаются по высоте, оставаясь параллельными друг другу.
Регулировочные характеристики
В условиях эксплуатации напряжение сети, на которую работает генератор, должно оставаться неизменным при изменении нагрузки от холостого хода до номинальной. Это достигается путем регулирования тока в параллельной обмотке возбуждения.
Регулировочная характеристика и указывает на то, как следует изменять ток возбуждения iB с изменением нагрузки U, чтобы напряжение на зажимах генератора Uоставалось неизменным при постоянной скорости вращения якоря генератора.
Регулировочная характеристика является основой для расчета и выбора регулировочной аппаратуры.
Снятие регулировочных характеристик при различном включении обмоток возбуждения производят по схемам рисунки 2.3 и 2.5 в такой последовательности. Приводят якорь генератора во вращение с номинальной скоростью и, возбудив генератор при холостом ходе до номинального напряжения на его зажимах, записывают показания приборов. Затем генератор постепенно нагружают от I = 0 до I = 1,2Iн. При этом ток возбуждения в параллельной обмотке изменяют так, чтобы напряжение на зажимах генератора все время оставалось постоянным при постоянной скорости вращения якоря генератора.
Для построения характеристик во время опыта необходимо снять 5—6 точек примерно через равные интервалы тока нагрузки.
Результаты измерения заносят в таблицу 2.6.
Таблица 2.6 – Регулировочные характеристики двигателя.
| U=UH=const, nH=const |
| I |
| iB |
По данным опыта строят регулировочные характеристики, примерный вид которых представлен на рисунке 2.6.
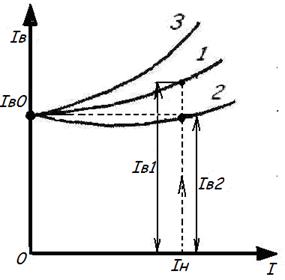
Рисунок 2.8 — Регулировочные характеристики генераторов.
1. – с параллельным, 2 и 3 – со смешанным возбуждением.
Кривая 1на рисунок 2.8 представляет собой регулировочную характеристику генератора при включении только одной параллельной обмотки возбуждения (генератора с параллельным возбуждением). Вид кривой указывает на то, что для обеспечения постоянного и равного номинальному напряжения на зажимах якоря такого генератора при увеличении тока нагрузки, следует увеличивать ток возбуждения. Увеличение тока возбуждения и, следовательно, магнитного потока необходимо для компенсации падения напряжения в цепи якоря и реакции якоря, которые определяются током нагрузки. Степень изменения тока возбуждения больше степени изменения тока нагрузки вследствие изменения насыщения магнитной цепи генератора при различных токах возбуждения, а также некоторой непропорциональности между реакцией якоря и током нагрузки. В генераторе со смешанным возбуждением при согласованном включении обмоток возбуждения вид регулировочной характеристики зависит от степени влияния последовательной обмотки возбуждения. В нормально компаундированном генераторе, внешняя характеристика которого представлена на рисунке 2.6 (кривая 2), при изменении тока нагрузки в пределах от нуля до номинального, когда при отсутствии регулирования тока возбуждения напряжение вначале несколько повышается, а затем понижается, для поддержания постоянства напряжения ток возбуждения следует вначале несколько уменьшить, а затем увеличивать (кривая 2рисунок 2.8).
Регулировочная характеристика генератора со смешанным возбуждением при встречном включении обмоток возбуждения (кривая 3рисунок 2.8) на графике располагается значительно выше регулировочной характеристики генератора с одной параллельной обмоткой возбуждения. Это объясняется тем, что увеличение тока возбуждения и, следовательно, магнитного потока полюсов этого генератора для поддержания постоянного напряжения на его зажимах необходимо не только для компенсации падения напряжения в цепи якоря и реакции якоря, но и для компенсации магнитодвижущей силы последовательной обмотки возбуждения.
Имея регулировочные характеристики генератора при включении одной параллельной обмотки возбуждения и при согласованном включении параллельной и последовательной обмоток возбуждения, можно определить соотношение витков обеих обмоток возбуждения. Для этого по регулировочным характеристикам (кривые 1 и 2рисунок 2.8) определяют токи возбуждения iB1 и iB2необходимые для создания номинального напряжения на зажимах генератора при номинальном токе нагрузки. Так как магнитодвижущая сила параллельной обмотки возбуждения, создаваемая разностью токов возбуждения iB1 и iB2равна магнитодвижущей силе последовательной обмотки возбуждения, создаваемой номинальным током iH, т.е.
то соотношение витков параллельной и последовательной обмоток возбуждения равно:
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Как проходит процесс самовозбуждения генератора постоянного тока?
- По каким причинам генератор может не самовозбудиться? Как практически определить причину невозбуждаемости генератора и как ее устранить?
- Как снять характеристику холостого хода генератора с параллельным возбуждением? Что называют внешней характеристикой генератора с параллельным возбуждением и как ее снимают?
- Какой вид имеет внешняя характеристика генератора с параллельным возбуждением и какие факторы влияют на изменение напряжения на его зажимах при изменении тока нагрузки? Почему в генераторе с параллельным возбуждением при уменьшении нагрузочного сопротивления ток нагрузки возрастает только до так называемого «критического» значения, после чего уменьшается одновременно с уменьшением нагрузочного сопротивления?
- Представляет ли опасность внезапное короткое замыкание генератора с параллельным возбуждением?
- Какие обмотки возбуждения имеет генератор со смешанным возбуждением? Чем они отличаются друг от друга и как их включать?
- Какая роль последовательной обмотки возбуждения в генераторе со смешанным возбуждением? Как опытным путем определить согласованность включения обмоток возбуждения генератора со смешанным возбуждением?
8. Как снимают внешнюю характеристику генератора со смешанным возбуждением при согласованном и встречном включении обмоток возбуждения?
9. Какое преимущество генератора со смешанным возбуждением над генератором с параллельным возбуждением?
10. В каких генераторах применяют встречное включение обмоток возбуждения?
11. Как снимают внешнюю характеристику генератора с последовательным возбуждением?
12. Какой вид имеет внешняя характеристика генератора с последовательным возбуждением и какие факторы влияют на характер изменения напряжения на его зажимах при изменении тока нагрузки?
13. Почему генератор с последовательным возбуждением не получил широкого практического применения?
14. Как снимают регулировочную характеристику генератора с параллельным возбуждением?
15. Как и почему необходимо изменять ток возбуждения генератора с параллельным и смешанным возбуждениями, чтобы напряжение при изменении тока нагрузки оставалось постоянным?
16. Как по регулировочным характеристикам генератора, снятым при включении одной параллельной обмотки возбуждения и при согласованном включении параллельной и последовательной обмоток возбуждения, определить соотношение числа витков обмоток возбуждения?
Характеристики двигателей постоянного тока
Рабочими называются регулировочная, скоростная, моментная и к.п.д. характеристики.
Регулировочная характеристика представляет зависимость скорости вращения П от тока Iв возбуждения в случае, если ток Iа якоря и напряжение U сети остаются неизменными, т. е. n=f(Iв) при Ia=const и U=const.
До тех пор, пока сталь магнитопривода машины не насыщена, поток Ф изменяется пропорционально току возбуждения Iв. В этом случае регулировочная характеристика является гиперболической. По мере насыщения при больших токах Iв характеристика приближается к линейной (рис. 2). При малых значениях тока Iв скорость вращения резко возрастает. Поэтому при обрыве цепи возбуждения двигателя (Iв = 0) с параллельным возбуждением скорость его вращения достигает недопустимых пределов, как говорят: «Двигатель идет вразнос». Исключение могут составлять микродвигатели, которые имеют относительно большой момент М0 холостого хода.

Рис. 2. Регулировочная характеристика двигателя
В двигателях последовательного возбуждения Iв = Iа. При малых нагрузках ток якоря Iа мал и скорость вращения может быть слишком большой, поэтому пуск и работа при малых нагрузках недопустимы. Микродвигатели так же, как и. в предыдущем случае, могут составлять исключение.
Скоростные характеристики дают зависимость скорости вращения п от полезной мощности Р2 на валу двигателя в случае, если напряжение U сети и сопротивление rв регулировочного реостата цепи возбуждения остаются неизменными, т. е. n=f(P2), при U=const и rв = const.

Рис. 3. Скоростные характеристики
С возрастанием тока якоря при увеличении механической нагрузки двигателя параллельного возбуждения одновременно увеличивается падения напряжения в якоре и появляется реакция якоря, которая обычно действует размагничивающим образом. Первая причина стремится уменьшить скорость вращения двигателя, вторая — увеличить. Действие падения напряжения в якоре обычно оказывает большее влияние. Поэтому скоростная характеристика двигателя параллельного возбуждения имеет слегка падающий характер (кривая 1, рис. 3).
В двигателе последовательного возбуждения ток якоря является током возбуждения. В результате скоростная характеристика двигателя с последовательным возбуждением имеет характер, близкий к гиперболическому. При увеличении нагрузки по мере насыщения магнитной цепи характеристика приобретает более прямолинейный характер (кривая 3 на рис. 3).
В компаундном двигателе при согласном включении обмоток скоростная характеристика занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения (кривая 2).
Моментные характеристики показывают, как изменяется момент М при изменении полезной мощности Р2 на валу двигателя, если напряжение U сети и сопротивление rв регулировочного реостата в цепи возбуждения остаются неизменными, т. е. М = f(P2), при U=const, rв=const.
Полезный момент на валу двигателя

Если скорость вращения двигателя параллельного возбуждения не изменялась бы с нагрузкой, то зависимость момента Ммех от полезной мощности графически представляла бы прямую линию, проходящую через начало координат. В действительности скорость вращения с увеличением нагрузки падает. Поэтому характеристика полезного момента несколько загибается кверху (кривая 2, рис. 4). При этом кривая электромагнитного момента М проходит выше кривой полезного момента Ммех на постоянную величину, равную моменту холостого хода М0 (кривая 1).
двигатель ток скоростной механический

Рис. 4. Моментные характеристики
В двигателе последовательного возбуждения вид моментной характеристики приближается к параболическому, так как изменение момента от тока нагрузки происходит, по закону параболы, пока сталь не насыщена. По мере насыщения зависимость приобретает более прямолинейный характер (кривая 4). В компаундном двигателе моментная характеристика (кривая 3) занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения.
Характеристика изменения коэффициента полезного действия.
Кривая зависимости к. п. д. от нагрузки имеет характерный для всех двигателей вид (рис 5). Кривая проходит через начало координат и быстро растет при увеличении полезной мощности до 1/4 номинальной. При мощности Р2, равной примерно 2/3 номинальной, к. п. д. обычно достигает максимального значения. При увеличении нагрузки до номинальной к. п. д. остается постоянным или незначительно падает.
ПОЧЕМУ РЕГУЛИРОВОЧНАЯ ХАРАКТЕРИСТИКА ДВИГАТЕЛЯ ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ КРИВОЛИНЕЙНА
Регулировочная характеристика двигателя параллельного возбуждения является криволинейной из-за нелинейной зависимости между величиной напряжения возбуждения и значениями нагрузки и скорости вращения. Это означает, что изменение напряжения возбуждения на разных участках кривой приводит к различным изменениям в работе двигателя, что может быть объяснено различными физическими процессами, такими как насыщение магнитного потока в обмотках статора и ротора.
Основы моментной модели управления ДВС (лекция). Часть 1
Электродвигатель постоянного тока 2ПБ90LУХЛ4 работа
3,11 Электромагнитный момент и механическая характеристика асинхронного двигателя