Ультразвуковой датчик расстояния
Ультразвуковой датчик расстояния определяет расстояние до объекта, измеряя время отображения звуковой волны от объекта. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая принимает отображенное эхо.Звуковой генератор (первая мембрана) создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука можно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно равно половине пройденного пути звуковой волны.
Ультразвуковой датчик расстояния HC-SR04
Ультразвуковой датчик расстояния (модуль HC-SR04) — это датчик, который использует акустическое излучение для определения расстояния до объекта. Этот бесконтактный датчик обеспечивает высокую точность и стабильность измерений.На показания датчика практически не влияют солнечное излучение и электромагнитные шумы.
Этот бесконтактный датчик обеспечивает высокую точность и стабильность измерений. Диапазон измерений составляет: от 2 см до 400 см. [1]
Какие датчики расстояния лучше
Осторожно, датчик приближения! Или о том, как испортить хороший смартфон
Сегодня у нас будет очень интересный и, надеюсь, полезный разговор, так как мы затронем проблему, с которой сталкивается огромное количество владельцев современных смартфонов.
К сожалению, у этой проблемы есть две неприятные особенности. Во-первых, если она уже проявилась, её практически невозможно решить. Разве что, продав смартфон. А во-вторых, заранее избежать этой проблемы довольно тяжело, так как о её причинах догадываются лишь единицы. Ведь она связана с, казалось бы, самым заурядным сенсором в мире — датчиком приближения.
Думаю, вы уже догадались, о чем идет речь. У каждого бывали ситуации, когда во время разговора по телефону экран смартфона случайно включался и вы запускали щекой различные приложения, отключали микрофон или нажимали кнопки в шторке.
На самом деле, такое может происходить часто, особенно, если вы по незнанию купили современный дорогой смартфон, на котором производитель сэкономил пару долларов, установив плохой датчик приближения или просто разместив его не в том месте.
Более того, даже хорошие датчики могут давать сбой по самым необычным причинам. К примеру, вы знали, что на точность работы этого сенсора влияет даже цвет ваших волос?
Датчик приближения — это одна из самых невероятных технологий в современном смартфоне, которая в будущем совершит настоящую революцию во многих областях. Но обо всем по порядку.
Датчик приближения в смартфоне. Теория эволюции.
Когда мобильные телефоны постепенно эволюционировали в смартфоны, у них появилось новое интересное свойство. Эти устройства научились ощущать приближение различных предметов к экрану.
Раньше это было неважно, так как во время разговора по «классическому» мобильному телефону вы не нажимали щекой механические кнопки. Но когда всю лицевую поверхность устройства занял большой сенсорный экран, реагирующий на малейшее прикосновение кожи, это стало настоящей проблемой.
В 2007 году вышел первый iPhone с набором новых необычных датчиков, в числе которых был и датчик приближения, находившийся в верхней рамке, слева от разговорного динамика:
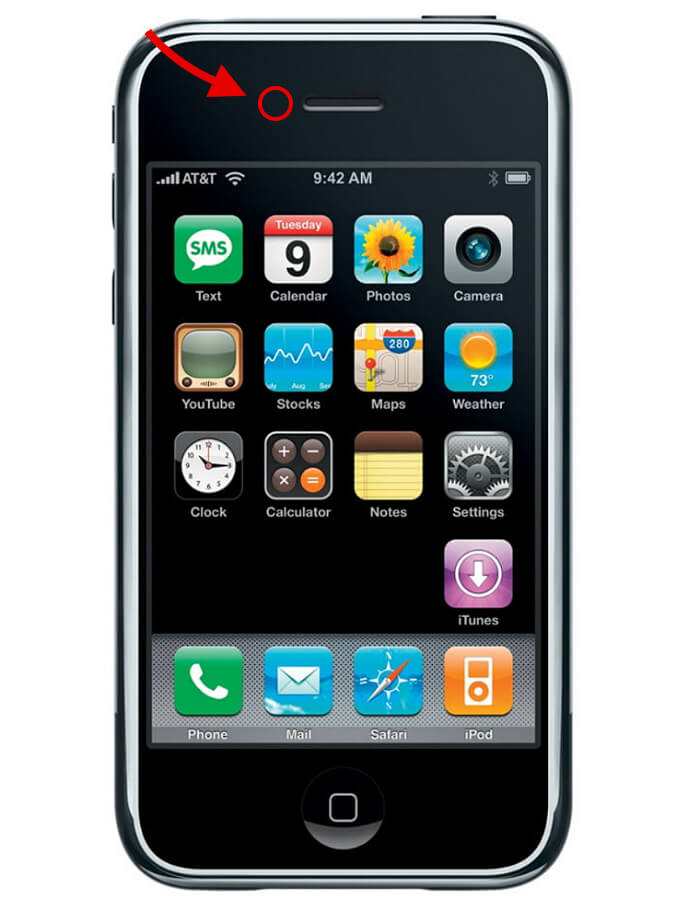
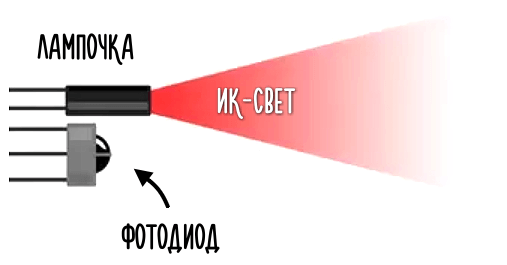
Принцип его работы был максимально прост. Датчик приближения состоял из лампочки и фотодиода, который измерял количество упавшего на него света.
Когда лампочка на мгновение загоралась, свет от нее освещал окружающие предметы. И если рядом ничего не было, свет просто улетал в окружающее пространство, а фотодиод не регистрировал никакого изменения в освещенности:
Но если прямо перед экраном появлялась какая-то преграда, свет лампочки отражался от этой преграды и тут же возвращался на фотодиод, который фиксировал значительное увеличение яркости:
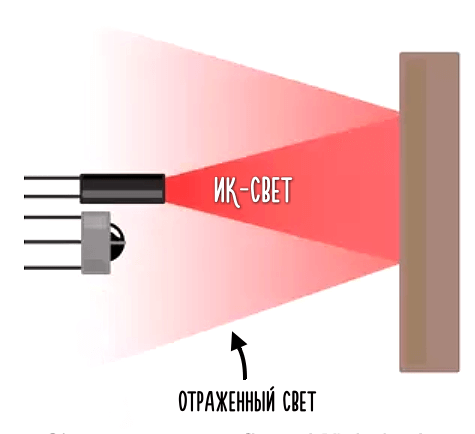
Разумеется, человек при этом ничего не замечал, так как «лампочка» (светодиод) излучает свет в инфракрасном спектре.
Эта незамысловатая технология позволила с удобством использовать смартфон в качестве обычного телефона. При входящем звонке он отключал экран, если пользователь подносил его близко к уху, тем самым исключая нежелательные случайные нажатия.
Постепенно датчик приближения улучшался. Нужно было решить серьезную задачу — заставить смартфон отключать экран при солнечном свете. Ведь в этом случае на фотодиод непрерывно попадает инфракрасное излучение от солнца, что заставляет смартфон «думать», будто рядом есть преграда.
Решение оказалось не самым сложным.
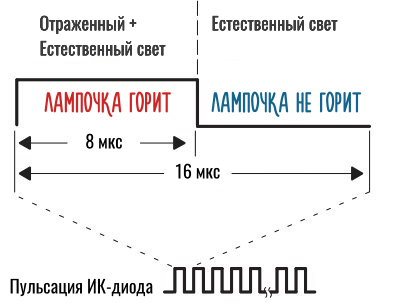
Естественное освещение попадает на датчик непрерывно, тогда как лампочка излучает свет импульсами. Несколько тысяч раз в секунду она загорается, скажем, на 8 микросекунд, а затем в течение следующих 8 микросекунд не горит:
Таким образом, смартфон следит только за интенсивностью пульсирующего с заранее известной частотой света. Это не только упрощает отслеживание именно излученного сигнала (а не внешнего освещения), но и значительно сокращает энергопотребление. Ведь лампочка не горит непрерывно.
Затем в игру вступил еще один примитивный сенсор — датчик освещенности. Смартфон дополнительно использовал информацию об общем уровне яркости, чтобы помогать датчику приближения избегать ошибок, вызванных ярким солнечным светом.
Так смартфоны научились варьировать различные параметры светодиода, чтобы значительно усиливать сигнал, когда датчик освещенности сообщал о ярком внешнем свете.
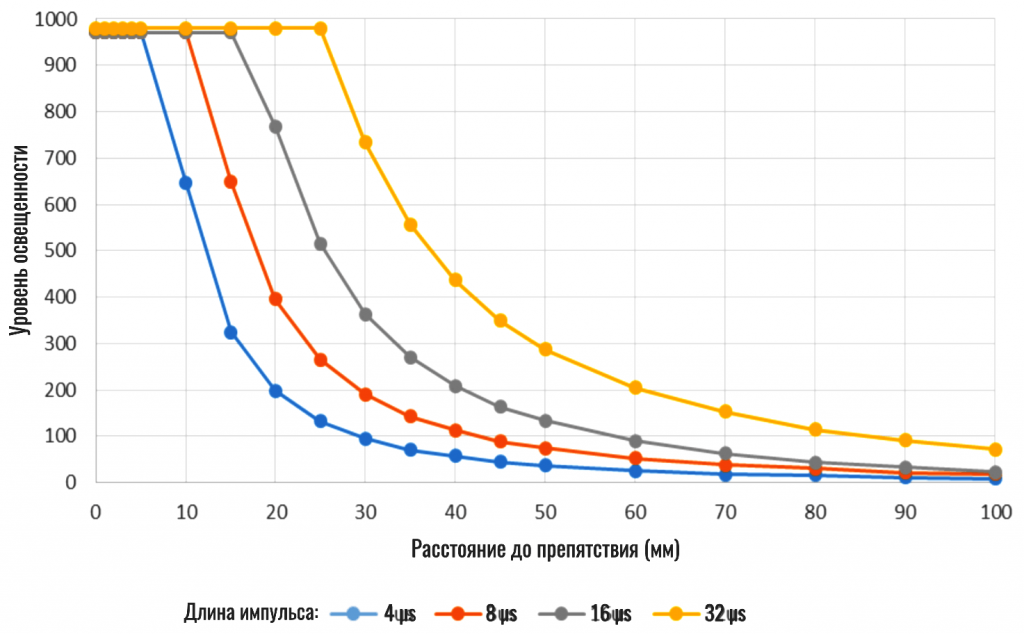
К примеру, если увеличить длину импульса (время, в течение которого горит лампочка датчика) с 8 микросекунд до 16 или даже 32 мкс, то сигнал будет возрастать пропорционально:
То же касается силы тока и других параметров.
В общем, какое-то время всё было более-менее хорошо, но не идеально. Ведь датчик приближения работает со светом и отсюда вытекают все его недостатки.
К примеру, под прямым углом практически весь свет от лампочки возвращается на фотодиод и смартфон чётко реагирует на приближение преграды.
Но под углом значительная часть света может отражаться в сторону и на датчик будет падать недостаточно света для того, чтобы сработала блокировка экрана. Хотя сам объект может находиться очень близко к смартфону.
Кроме того, количество отраженного света напрямую зависит от цвета волос пользователя. Черный цвет потому и черный, что от него не отражается свет. И когда брюнетка подносит свой смартфон к уху, на фотодиод возвращается гораздо меньше света, чем если бы на пути оказались светлые волосы или неприкрытое ухо.
Также не стоит забывать и о сальных железах или макияже. Когда мы говорим по телефону, стекло постоянно соприкасается с кожей и на него попадает кожный жир, тональный крем и т.п. Это не только снижает чувствительность фотодиода, но и сильнее рассеивает свет от лампочки.
В общем, проблем хватало, пока кому-то в голову не пришла одна «гениальная идея».
Нет датчика — нет проблем! Или о том, что такое виртуальный датчик приближения
К 2016 году смартфоны использовали целый набор датчиков, чтобы корректно обрабатывать отключение экрана при входящем звонке: датчик приближения, датчик освещенности, акселерометр.
И тут один стартап предложил производителям смартфонов заменить реальный датчик приближения на алгоритм (нейросеть).
Суть работы так называемого виртуального (или программного) датчика приближения заключалась в следующем. Смартфон использовал привычные сенсоры (акселерометр, сенсорный экран, датчик освещенности) и дополнительно еще два устройства: микрофон и динамик.
Новый алгоритм получил красивое название Inner Beauty (в переводе с англ. внутренняя красота) и заменил собой классический датчик приближения (с лампочкой и фотодиодом) на смартфоне Xiaomi Mi Mix, выпущенном в 2016 году:

Чтобы понять, в чем заключалась принципиальная проблема новоиспеченного датчика приближения, нужно вкратце вспомнить, что такое нейросеть.
В основном её используют тогда, когда не знают чёткого алгоритма действий или же этот алгоритм слишком сложный. Виртуальный датчик приближения — как раз тот случай.
Главная задача перед разработчиками состояла в обучении нейросети определять по ультразвуку наличие или отсутствие преград. Для этого динамик посылал звуковую волну, которая отражалась от предметов и возвращалась на микрофон, после чего алгоритм анализировал полученный сигнал.
Нейросетям предоставили тысячи сэмплов отраженного сигнала, когда рядом есть препятствие и когда его нет. Таким образом она научилась различать ультразвук в разных ситуациях.
Но все мы прекрасно знаем, что работают современные нейросети далеко не идеально. В качестве примера можно вспомнить портретный режим в камере, который в сложных ситуациях не способен качественно отделить главный объект от фона и пр.
То же получилось и здесь. В целом, технология работала неплохо. В чем-то она даже оказалась лучше классического (инфракрасного) датчика приближения, так как цвет препятствия уже не играл роли. Но часто нейросеть не справлялась с поставленной задачей и экран смартфона мог включаться во время звонка (или вовсе не отключаться) со всеми вытекающими последствиями.
Однако идея сэкономить пару долларов и место внутри корпуса, избавившись от лишних датчиков на фронтальной панели, показалась многим производителям отличным решением. При этом качество работы нового «виртуального» датчика отошло на второй план. Фактически нейросеть + ультразвук работали гораздо хуже лампочки и фотодиода.
В результате на рынке появилось огромное количество смартфонов без нормального датчика приближения. Вот лишь небольшая часть из этого списка:
- Redmi Note 10
- Redmi Note 10 Pro
- Samsung Galaxy A32
- Samsung Galaxy A52
- Samsung Galaxy A72
- Samsung Galaxy S20 FE
- Xiaomi Mi 10 Pro
- Xiaomi Mi 11 Lite
- OnePlus 7 Pro
- OPPO Find X
- Vivo X60
Некоторые компании пошли еще дальше и даже не стали заморачиваться с ультразвуком, оставив лишь сенсорный экран и акселерометр. Так появились смартфоны Huawei P Smart Z, Y9s, P40 Lite E и другие:
Встречались и такие ситуации, когда на смартфоне использовался нормальный ИК-датчик приближения, но для него не находилось места на фронтальной панели. К примеру, на смартфонах Honor 20, Honor 20 Pro и Huawei Nova 5T он размещался на верхнем торце.
Естественно, такое расположение приводило к серьезным проблемам. На этих смартфонах постоянно загорался экран во время телефонных разговоров.
На некоторых устройствах датчики приближения и освещенности могут находиться в разных местах, что также может приводить к повышенному количеству ложных срабатываний. В этом случае пользователь может прикрыть датчик приближения, оставив при этом датчик освещенности открытым, и смартфон будет получать противоречивые данные.
Сегодня многие Android-флагманы, например, от компании Samsung, используют устройства, совмещающие сразу несколько датчиков и технологий на одной плате. Это позволяет снизить цену и сэкономить место внутри.
К примеру, в линейке Ultra используются сенсоры от Austria Micro Systems, совмещающие классический датчик приближения (с инфракрасной лампочкой), датчик освещенности и RGB-датчик цвета. То есть, эти устройства легко могут определять не только освещенность, но и цвет, чтобы подстраивать баланс белого экрана.
Такие датчики можно удобно прятать под AMOLED-дисплеем, что мы и видим на современных аппаратах.
Но по-настоящему революционное решение впервые появилось в том же 2016 году, только в смартфонах от Apple.
Однофотонные лавинные диоды. Технология, которая может навсегда изменить фотографию
Начиная с iPhone 7 в телефонах от Apple вместо классического инфракрасного датчика приближения (и его дешевой альтернативы в лице виртуального датчика) используется совершенно другое устройство от STMicroelectronics.
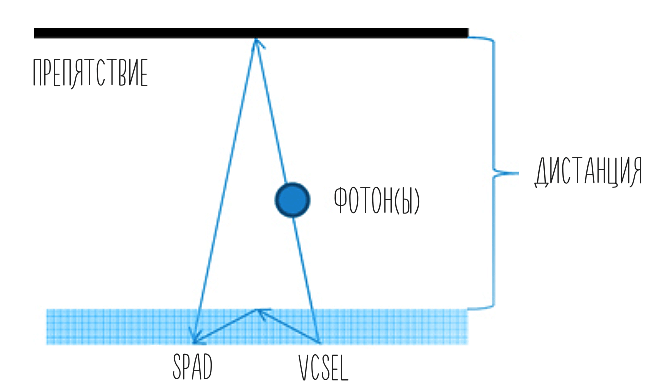
Это так называемый однофотонный лавинный диод (SPAD). Суть технологии заключается в том, что специальный лазер VCSEL (вертикально-излучающий лазер) «выстреливает» фотоны с определенной длиной волны (например, 940 нанометров) и засекает время.
Дальше фотоны сталкиваются с препятствием и часть из них возвращается на SPAD-сенсор. Как только на этот сенсор попадает хотя бы один единственный фотон, датчик моментально фиксирует его и отмечает время прибытия.
Таким образом, зная скорость света (300 тыс. км. в секунду) и точное время полета фотона, мы можем легко определить расстояние до препятствия.
Например, если препятствие находится на расстоянии в 1 см от экрана, тогда фотону потребуется 33 пикосекунды (1 пикосекунда — это триллионная доля секунды), чтобы долететь до него и еще 33 пс, чтобы вернуться обратно на сенсор.
Эта технология поражает воображение тем, что сенсор может зафиксировать всего одну единственную неделимую частицу света (фотон), а современный электронный «секундомер» легко оперирует пикосекундами.
Подавляющее большинство пользователей даже не догадываются, что в их смартфонах используются такие технологии. Естественно, они стоят дороже «копеечных» инфракрасных сенсоров и, тем более, различных алгоритмов виртуальных датчиков.
Преимущество SPAD-сенсора заключается в том, что датчик работает с минимальным количеством света и определяет расстояние по времени полета, а не яркости света. В теории, даже если на сенсор возвратится всего один фотон от препятствия, этого будет достаточно, чтобы определить расстояние.
Поэтому цвет поверхности и даже угол её наклона не играют такой большой роли, как в случае с классическими ИК-сенсорами.
Назревающая революция
Естественно, применение однофотонных лавинных диодов не ограничивается датчиком приближения. В будущем SPAD-сенсоры смогут заменить в камерах привычные нам матрицы.
Современные пиксели собирают в течение какого-то времени весь падающих на них свет. Затем сенсор считывает общее количество света, преобразовывает аналоговый сигнал в цифровой, параллельно собирая шум и в конце мы получаем значение каждого пикселя — его яркость в цифровом виде.
Пиксели SPAD-сенсора работают с каждой конкретной частицей света (фотоном). Как только фотон падает на такой пиксель, мы тут же получаем его цифровое значение с минимальным количеством шума.
Кроме того, слово «лавинный» в названии диода означает то, что единственный фотон может вызвать эффект лавины. Когда частица света попадает на матрицу, происходит «цепная реакция» и высвобождается большое количество электронов:
Таким образом, SPAD-сенсор может усиливать сигнал в миллионы раз без ущерба качеству. Всё это позволяет сокращать время выдержки до нескольких наносекунд или снимать со скоростью в десятки тысяч кадров в секунду.
Добавьте сюда еще тот факт, что каждый пиксель может содержать информацию о том, насколько далеко от камеры находится точка в пространстве, откуда прилетел фотон. То есть, мы получаем максимально подробную и точную информацию о глубине сцены.
Однофотонные лавинные диоды уже сегодня применяются во многих областях, включая датчики приближения на iPhone и ToF-сенсоры на других смартфонах. Но самое интересное нас ждет впереди.
Выводы. Или как не испортить хороший смартфон плохим датчиком?
Как видите, за таким неприметным и скучным сенсором как датчик приближения, стоит целая череда научных открытий и изобретений.
К сожалению, производители заинтересованы не только (а порою кажется, что не столько) в том, чтобы улучшать какие-то технологии, но и в том, чтобы значительно сократить расходы и снизить себестоимость товара для увеличения прибыли.
Это желание привело к тому, что сегодня во многих смартфонах установлены в буквальном смысле копеечные датчики или заменяющие их программные алгоритмы.
Если вы приобрели смартфон с виртуальным датчиком, скорее всего, время от времени вы будете сталкиваться с характерными проблемами. И никакие приложения или калибровки вам не помогут. Нейросеть прошла обучение задолго до того, как вы впервые включили свой смартфон, а именно это больше всего влияет на качество работы алгоритма.
Конечно, иногда бывают банальные проблемы, решить которые очень просто. Например, это может быть чехол, который немного прикрывает сенсор или защитное стекло, которое сильно рассеивает ИК-излучение от светодиода. Сменив чехол или убрав стекло/пленку, вы улучшите работу датчика.
То же касается и виртуальных сенсоров. К примеру, Redmi Note 10 Pro использует ультразвуковые волны, которые одновременно выходят из фронтального динамика и верхнего торца. Если чехол прикрывает одно из этих отверстий, качество работы датчика заметно снизится.
Также могут встречаться ситуации, когда на смартфоне установлен нормальный датчик, в правильном месте, но всё работает крайне плохо. А причина банальна — плохое качество сборки, в результате чего датчик не плотно прилегает к стеклу или нарушена перегородка между лампочкой и фотодиодом. К слову, эта проблема часто встречается после замены экрана или даже после падения смартфона.
Поэтому главным решением проблемы с датчиком приближения является знание. Вы должны понимать суть проблемы и обращать внимание на то, какой именно сенсор используется в интересующей вас модели. А для этого необходимо читать хорошие обзоры, в которых внимание уделяется как раз таким моментам, а не очередным бесполезным тестам AnTuTu.
На какой датчик расстояния влияет солнечный свет
В прошлом бесконтактные датчики расстояния выдавали информацию только лишь о наличии или отсутствии предмета перед датчиком в виде дискретного сигнала ON/OFF.
В наши дни датчики для измерения расстояния могут использовать различные принципы измерений: индуктивный, ультразвуковой или оптический, однако все они имеют электрический выходной сигнал, величина которого пропорциональна расстоянию до измеряемого объекта.
В таблице 1 представлены основные типы аналоговых бесконтактных датчиков для измерения расстояний и их основные особенности.
Таблица 2. Характеристики различных датчиков расстояния

Индуктивные датчики. Индуктивные датчики расстояния определяют расстояния до проводящих металлических объектов, таких как сталь, алюминий, латунь. Поскольку принцип работы индуктивных датчиков основан на определении токов взаимной индукции, такие датчики очень устойчивы к воздействию неметаллических предметов и помех, таких как, например, пыль или машинное масло. Современные технологии позволяют создать индуктивный датчик с аналоговым выходом имеющей диаметр всего 6 мм и измеряемое расстояние 2 мм. Такие датчики с высоким разрешением и быстрым временем отклика находят применение в большинстве высокоскоростных задач.
Емкостные датчики. Принцип действия основан на изменении электрического поля, генерируемого датчиком, при появлении объекта в зоне его чувствительности. В отличии от индуктивных, емкостные датчики реагируют на предметы из любого материала. Емкостные датчики используют для контроля заполнения бутылки (сквозь ее стенку), контроль сыпучих и жидких материалов в бункерах и емкостях, контроль разрыва/провисания ленты и т.п. Необходимо отметить, что в описаниях к изделиям указывается номинальное расстояние срабатывания, измеренное на заземленный лист стали. Если объект выполнен из другого материала, то необходимо пользоваться таблицей поправочных коэффициентов (коэффициент, как правило, меньше единицы и сильно зависит от наличия влаги в материале). Максимальное расстояние срабатывания составляет около 50 мм.
Емкостные датчики обладают высокой надежностью, в них отсутствует эффект «тяжения», трения. Отрицательными качествами является нелинейность, сложность обработки сигналов и низкая точность.
Ультразвуковые датчики. Общий принцип действия ультразвуковых датчиков расстояния основан на излучении импульсов ультразвука и измерении, пока звуковой импульс, отразившись от объекта измерения, вернется обратно в датчик. При этом достигается разрешения до 0,2 мм.
Благодаря тому, что пьезорезистивный преобразователь может служить как излучателем, так и приемником ультразвуковых импульсов, появляется возможность создать ультразвуковые датчики расстояния с одним преобразователем. Такой преобразователь сначала излучает короткий ультразвуковой импульс. Одновременно с этим, в датчике запускается внутренний таймер. Когда отраженный от объекта ультразвуковой импульс вернется обратно в датчик, таймер останавливается. Время, прошедшее между моментом излучения импульса и моментом, когда отраженный импульс вернулся в датчик, служит основой для вычисления расстояния до объекта. Полный контроль за процессом измерения производится с помощью микропроцессора, обеспечивающего высокую линейность измерений. Наиболее важными особенностями применений ультразвуковых датчиков служит их возможность измерять расстояния до таких сложных объектов таких как, например, сыпучие вещества, жидкости, гранулы, прозрачные или напротив сильно отражающие поверхности. В дополнение ультразвуковыми датчиками можно измерять сравнительно большие расстояния, при этом, сохраняя их небольшие размеры, что может быть существенно для ряда применений.
Более простой способ использования ультразвуковых датчиков состоит в приеме уже сгенерированного «маяком» ультразвукового сигнала. В этом случае нет необходимости сначала излучать короткий ультразвуковой импульс, а расстояние до наблюдаемого объекта измеряется путем анализа амплитуды пришедшего сигнала (подразумевается, что максимальная амплитуда сигнала, соответствующая нулевому расстоянию до объекта-маяка, известна). Пьезоэлектрический преобразователь воспринимает звуковую волну и преобразует ее в электрический сигнал.
Однако и ультразвуковые датчики имеют ряд ограничений. Прежде всего, это пена и другие объекты, сильно поглощающие ультразвуковые колебания. Такое поглощение сильно уменьшает измеряемую дистанцию. Сильно изогнутые поверхности так же снижают расстояние и точность измерений, поскольку рассеивают ультразвуковые колебания в различных направлениях. Ультразвуковые датчики излучают импульс в виде широкого конуса, что так же ограничивает возможность измерения расстояния до небольших объектов, увеличивая уровень помех от других объектов, которые так же могут находиться в поле зрения датчика. Некоторые ультразвуковые датчики имеют конус с углом всего 5 градусов. Это позволяет использовать их для измерения намного меньших объектов, например таких, как бутылки или ампулы.
Оптические датчики. Существует множество различных способов измерить расстояние до предмета с помощью оптики: например лазерные интерферометры, датчики с рассеянным отражением света и оптические датчики радарного типа. Каждый из видов датчиков имеет свои сильные и слабые стороны. Лазерные интерферометры имеют большой диапазон измерений и точность несколько нанометров, однако, эти приборы очень дорогие и сложные в эксплуатации. Датчики с рассеянным отражением и аналоговым выходом могут измерять расстояния в широких пределах, однако поскольку они работают с отраженным светом, то могут быть проблемы с измерением расстояний до окрашенных или отражающих объектов. Оптические датчики радарного типа, преимущественно лазерные, могут измерять большие расстояния, однако принцип их работы, основанный на измерении времени распространения света от датчика до объекта и обратно, позволяет измерять с ограниченным разрешением в 2 – 3 мм.
Подавляющее большинство задач по измерению в промышленности приходится на диапазоны от долей микрон до нескольких десятков метров. При этим датчики должны работать с объектами далекими от идеальных: малого размера, имеющих различный цвет, сложную структуру поверхности и перемещающихся с высокой скоростью. Для таких целей наиболее подходят лазерные датчики расстояния, работающие по принципу оптической триангуляции.
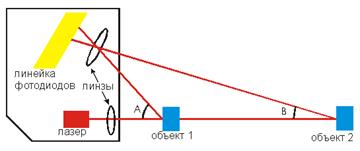
Рисунок 26. Принцип работы оптического датчика расстояния
На рисунке показан принцип работы оптического датчика расстояния. Лазер посылает через линзу луч, который отражается от объекта и фокусируется на линейке из фотодиодов, которая преобразует световой сигнал в электрический. Всякое изменение расстояния до объекта вызывает изменение угла отраженного луча и, следовательно, позиции, которую отраженный луч занимает на линейке фотодиодов. Микроконтроллер обрабатывает сигнал от линейки фотодиодов и преобразует его в аналоговый электрический сигнал.
Наиболее важное качество таких датчиков расстояния состоит в сочетании высокой точности измерения и больших измеряемых расстояниях. Большинство производителей предлагают датчики с разрешением от 1 мкм до 1мм. Однако высокая точность возможна только на относительно коротких расстояниях. Так что, например, точность в 1 мкм на расстояниях в 1 метр получить вряд ли удастся.
Для снижения влияния шумов все лазерные датчики расстояний позволяют проводить интегральные или усредненные измерения. При этом производится множество измерений расстояния до объекта и результат потом усредняется, тем самым повышается точность измерений. Однако большая точность требует большого количества измерений, увеличивая при этом общее время измерения. Так, например, что бы обеспечить точность в 1 мкм типичное время измерения составляет порядка 0,1 сек.
Вывод: Рассмотрев предложенные типы датчиков расстояния, остановимся на ультразвуковых датчиках, позволяющих определять расстояния до объектов на дистанциях до 10 метров, а также обладающих точным определением скорости передвижения объекта.
В разрабатываемой системе управления будем использовать датчик фирмы SICK UM30-15113. Он обладает следующими основными характеристиками:

Рисунок 27. Внешний вид выбранного датчика расстояния
· Максимальная дальность 8м;
· Выход: аналоговый 4-20 мA/0-10 В;
· корпус М30х1,5 — никелированная латунь, разъём М12, 4 контакта.
4.6 Обоснование и выбор схемы вычитания:
Схема вычитания предназначена для получения сигнала рассогласования между входами.
Схемотехнически она реализуется следующим образом:
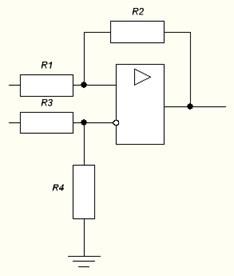
Рисунок 28. Схема вычитания


4.7 Обоснование и выбор схемы суммирования:
Схема суммирования предназначена для получения суммарного сигнала с двух входов. Схемотехнически она реализуется следующим образом:
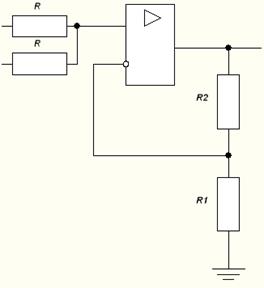
Рисунок 29. Схема суммирования
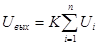

где n – число входов.
4.8 Обоснование и выбор регулятора:
Главная задача систем регулирования состоит в том, чтобы стабилизировать параметры процесса на заданном уровне при воздействии внешних возмущающих воздействий, действующих на объект управления. Этим занимаются системы автоматической стабилизации. Другой не менее важной задачей является задача обеспечения программного перехода на новые режимы работы. Решение этой проблемы осуществляется с помощью той же системы стабилизации, задание которой изменяется от программного задатчика.
К автоматическим системам регулирования предъявляются требования не только по устойчивости процессов регулирования во всем диапазоне нагрузок на объект, но и по обеспечению определенных качественных показателей процесса автоматического регулирования. Ими являются:
· Ошибка регулирования (статистическая или среднеквадратическая составляющие).
Наиболее широко применяются следующие виды регуляторов:
1. П-регулятор – это линейный усилитель (между выходом и входом прямая зависимость), фазовый сдвиг которого в частотном диапазоне входных воздействий пренебрежительно мал. Введение такого регулятора в систему дает статическую ошибку С0 (ошибка по координате), но в некоторых случаях позволяет сделать систему регулирования устойчивой.
2. ПИ-регулятор – регулятор, использующий пропорционально-интегральный закон регулирования. Использование такого регулятора в системе дает астатическую ошибку первого порядка С1, так называемую ошибку по скорости. При этом за счет интегрального закона регулирования статическая ошибка равна нулю.
3. ПИД-регулятор – основан на пропорционально – интегрально – дифференциальном законе регулирования системы. Как и ПИ-регулятор, ПИД обеспечивает астатическое регулирование. При этом С0 и С1 равны нулю, за счет использования трех звеньев. Данный вид регуляторов плавно уменьшает ошибку регулируемой величины в ходе своей работы. Полезным свойством данных регуляторов является возможность преобразования выходного сигнала в ШИМ.
Вывод: Для создания регулятора будем использовать ПИД-регулятор.
Разрабатываемую функциональную схему можно условно разделить на 3 блока:
— Блок управления скоростью вращения левого колеса
— Блок управления скоростью вращения правого колеса
— Блок определения расстояния и направления до объекта следования
Функциональная схема устройства представлена в приложении А.
В настоящее время происходит бурный рост цифровой техники. Повсеместно создается множество цифровых элементов, которые раньше можно было реализовать только в аналоговом варианте. Цифровые элементы более надежны, функциональны и обладают рядом достоинств:
1. Полностью отсутствует дрейф нуля;
2. Имеется возможность запоминания и коррекции измеряемых значений управляемых (скорость, ускорение, угол) и управляющих (ШИМ) величин;
3. Способны к многоконтурному управлению без наращивания аппаратуры;
4. Способны реализовать не только традиционные линейные законы управления, но и нелинейные.
Исходя из этого разрабатываемую систему управления будем проектировать как цифровую систему управления. В этом случае многие элементы функциональной схемы можно заменить одним – микроконтроллером.
Микроконтроллер – это устройство, включающее в себя ОЗУ, ПЗУ, способное выполнять заложенную в него программу. В зависимости от комплектации МК может иметь и АЦП, ШИМ-модулятор, и т.д.
Наиболее известными являются микроконтроллеры фирмы «Microchip». Их основные особенности это:
1. Достаточно низкая цена 2-10$;
2. Высокая надежность;
3. Развитая периферия;
4. Высокое быстродействие (выполнение команды составляет 100-200 нсек);
Данная фирма выпускает следующие серии микроконтроллеров:
· серия 12С5х – простейшие контроллеры (таймер, DIP8);
· серия 12С67х – простейшие контроллеры (таймер, АЦП, DIP8);
· серия 16С7х – самые распространенные и наиболее «напичканные» периферийными устройствами;
· серия 16С77х – с 12-ти битными АЦП;
· серия 16С78х – АЦП, ЦАП, операционный усилитель, компаратор;
· серия 16С64(66)х – с аналоговыми компараторами 16С7х;
· серия 16С8х – модернизированный вариант старой серии 16С5х;
· серия 16С9хх – имеет выход на ЖКИ;
· серия 17Схх – имеет встроенный умножитель чисел и ориентирована на выполнение математических операций;
· серия 16F87Х – аналог 16C7х но с Flash-памятью 10-ти битными АЦП;
· серия 16С8ххх – 10-ти битные АЦП, 40 МГц тактовая частота, 4 таймера.
При выборе микроконтроллера следует учесть, что сигналы с выходов датчиков будут подаваться в аналоговом виде. Значит, для их обработки необходим АЦП. Исходя из этого выберем серию 16F87x для использования в системе управления.
Список литературы
1. Сборник научных трудов «Мобильные робототехнические комплексы» – М.:ИФТП 1990г.
2. Библиотека электронных компонентов. Выпуск 3: Силовая электроника фирмы HARRIS – М. ДОДЭКА, 1999 г., 32 с.
3. Лекции по курсу “ Технология проектирования СУ ” Ерилов Ю.В.
4. Лекции по курсу “ Микропроцессорные устройства систем управления ” Морозов Б.А.
roboforum.ru
Ультразвуковые и инфракрасные датчики расстояния.
Ультразвуковые и инфракрасные датчики расстояния.
Marvin » 28 апр 2011, 03:00
15 градусов.
ИК (например GP2D12) — расстояние: 10см — 80см. В чем еще разница и какие подводные камни?
Re: Ультразвуковые и инфракрасные датчики расстояния.
avr123.nm.ru » 28 апр 2011, 07:11
Re: Ультразвуковые и инфракрасные датчики расстояния.
=DeaD= » 28 апр 2011, 07:40
Разные реакции на разные материалы.
К примеру ИК не видит зеркало под углом, а сонар — человека в свитере.
Re: Ультразвуковые и инфракрасные датчики расстояния.
SkyStorm » 28 апр 2011, 09:22
[[ИК-дальномеры SHARP]] — Статья вики про ИК дальномеры.
[[Сонары]] — список наиболее популярных с сылками на даташиты.
У ик дальномеров диаграма направленности примерно 3 градуса, у санаров в до 45.
Поэтому на мелких платформах сонары реже пользуют от пола отсвечивает.
Re: Ультразвуковые и инфракрасные датчики расстояния.
Strijar » 28 апр 2011, 10:30
Re: Ультразвуковые и инфракрасные датчики расстояния.
=DeaD= » 28 апр 2011, 11:03
Re: Ультразвуковые и инфракрасные датчики расстояния.
Strijar » 28 апр 2011, 12:52
Ну да, это и имел ввиду. Выразился коряво Короче, как на радаре!
Re: Ультразвуковые и инфракрасные датчики расстояния.
Kerzh » 20 июл 2011, 12:45
Re: Ультразвуковые и инфракрасные датчики расстояния.
=DeaD= » 20 июл 2011, 12:51
Re: Ультразвуковые и инфракрасные датчики расстояния.
Kerzh » 20 июл 2011, 12:55
Re: Ультразвуковые и инфракрасные датчики расстояния.
=DeaD= » 20 июл 2011, 13:05
Ну так может задачу хотя-бы приблизительно озвучите?
Только не надо озвучивать её как "переместить груз из точки А в точку Б", потому что под неё опять подойдёт и легковой и грузовой автомобили и даже трактор а еще сухогрузы и поезда.
Re: Ультразвуковые и инфракрасные датчики расстояния.
Kerzh » 20 июл 2011, 13:14
Re: Ультразвуковые и инфракрасные датчики расстояния.
=DeaD= » 20 июл 2011, 13:16
Re: Ультразвуковые и инфракрасные датчики расстояния.
Kerzh » 20 июл 2011, 13:22
Re: Ультразвуковые и инфракрасные датчики расстояния.
=DeaD= » 20 июл 2011, 13:26
Ну как-то же люди определяются — нужен им легковой автомобиль, грузовой или трактор
Добавлено спустя 1 минуту 32 секунды:
Подсказываю — характер препятствий, масштаб робота, скорости, область применения (уровень загрязнения, наличие солнечного света) и т.п.