Слободянюк А.И. Физика 10/3.3
§3. Криволинейное движение. Плоскопараллельное движение твердого тела
3.3 Суперпозиция движений
Мы изучили несколько простейших моделей движения. Сейчас постараемся показать, как из этих простых движение можно «конструировать» более сложные и красивые движения. Слово «суперпозиция» обозначает сложение, наложение, сочетание — оно очень часто используется в физике. Возможность такого наложения различных видов движения обусловлена возможностью описывать его в различных системах отсчета и переходить из одной системы в другую по формулам \(
\vec r = \vec r_0 + \vec r\,’\) . Теперь мы можем задавать независимо закон движения в подвижной системе отсчета \(
\vec r\,'(t)\), закон движения самой движущейся системы \(
\vec r_0(t)\) и получать более сложный закон движения. Далее может быть, что и неподвижная система отсчета движется относительно другой «еще более неподвижной» системы, тем самым добавляется еще одно слагаемое и т.д. На этом пути открываются практически неограниченные возможности, рассмотреть их всех невозможно, поэтому мы вынуждены ограничиться несколькими простыми, но красивыми движениями.
Движение тела, брошенного под углом к горизонту можно представить в виде суперпозиции равномерного движения вдоль горизонтальной оси и равноускоренного движения вдоль вертикальной оси. Такой «суперпозиции» можно придать наглядный смысл: пусть в вагоне равномерно и прямолинейно движущегося поезда вверх подброшен небольшой шарик. В системе отсчета, связанной с вагоном, шарик движется вдоль вертикальной прямой с постоянным ускорением свободного падения. А в системе отсчета, связанной с землей, движение шарика будет движением по описанной ранее параболе. Отметим также, что «разложение движения на составляющие» не является однозначным [1] . Так то же движение тела, брошенного под углом к горизонту, можно представить в виде «суммы» равномерного движения вдоль прямой направленной под углом к горизонту, задаваемой вектором начальной скорости, и равноускоренного движения вдоль вертикальной прямой. Фактически эти разложения мы использовали ранее при описании этого движения.
Суперпозиция вращательного и поступательного движений.
Пусть материальная точка А движется по прямому стержню с постоянной скоростью V, а стержень вращается вокруг оси с постоянной угловой скоростью ω. Совместим начало системы отсчета с осью вращения (рис. 28). Тогда расстояние от точки А до начала отсчета и угол поворота стержня зависят от времени по законам l = Vt , α = ωt.
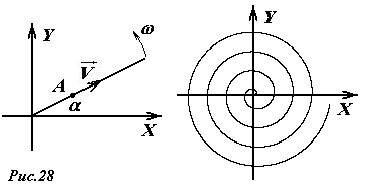
Зависимость декартовых координат точки от времени имеет вид
\begin
и описывает движение по спирали.
Еще одна суперпозиция поступательного и вращательного движений.
Пусть колесо радиуса R катится по горизонтальной поверхности без проскальзывания. Точка А расположена на расстоянии a от оси колеса (будем считать, что a может быть как меньше, так и больше R — такие точки можно найти, например, на железнодорожном колесе). Построим семейство траекторий точек колеса.
Пусть в начальный момент времени центр колеса находится в точке O, введем систему координат, ось X которой проходит вдоль поверхности, по которой катится колесо, а ось Y перпендикулярна этой поверхности и проходит через точку O (рис. 29).
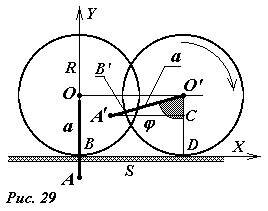
Выберем точку А на расстоянии a от центра и первоначально находящуюся на оси Y. Посмотрим как изменится положение этой точки, когда колесо повернется на некоторый угол φ = ωt (на рис. это ∠A’O’D’). Центр колеса сместится на расстояние S и займет положение O’, а точка А окажется в точке А’. Так как движение происходит без проскальзывания, то смещение колеса S = |OO’| = |BD| будет равно длине дуги DB’. Поэтому S = Rφ , где угол φ, естественно, измеряется в радианах. Координаты центра колеса будут равны \(
x_
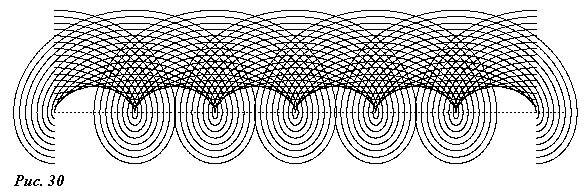
\begin
Посмотрите на эти траектории (рис.30) при a, изменяющемся от -3R до 3R (с шагом R/4). Не правда ли, эффектные кривые!
Суперпозиция двух вращательных движений.
Посмотрим, какую траекторию описывает точка M колеса радиуса r, катящегося без скольжения по другой неподвижной окружности радиуса R (рис. 31).
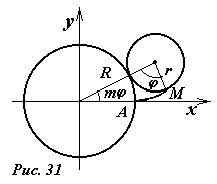
Обозначим φ = ωt — угол поворота колеса, \(
m = \frac
\begin
Вид траектории полностью определяется параметром m. Если этот параметр является рациональным числом \(
m = \frac
\) , (p, q — целые числа), то траектория является замкнутой.
Посмотрите на различные траектории, описываемые этими уравнениями (рис. 32). На всех рисунках — в центре изображение той окружности, по которой катится колесо.
6.Плоское движение твердого тела.
Плоское движение — это такое движение твердого тела, при котором траектории всех его точек лежат в параллельных плоскостях. Если в теле провести некоторую прямую O1O2, перпендикулярную этим плоскостям (рис. 1.9), то все точки этой прямой будут двигаться по одинаковым траекториям с одинаковыми скоростями и ускорениями; сама прямая будет, естественно, сохранять свою ориентацию в пространстве. Таким образом, при плоском, или, как его иногда называют, плоско-параллельном, движении твердого тела достаточно рассмотреть движение одного из сечений тела.
Обратимся к классическому простому примеру плоского движения — качению цилиндра по плоскости без проскальзывания. Рассматривая одно из сечений цилиндра плоскостью, перпендикулярной его оси, мы придем к известное задаче о катящемся колесе (рис. 1.10). Центр колеса движется прямолинейно, траектории других точек представляют собой кривые, называемые циклоидами.
При отсутствии проскальзывания мгновенная скорость самой нижней точки колеса (точки M) равна нулю. Это позволяет рассматривать качение колеса как суперпозицию двух движений: поступательного со скоростью оси и вращательного с угловой скоростью где — радиус колеса. Ясно, что в этом случае
Попробуем обобщить этот прием на произвольное плоское движение.
Выделим отрезок АB в рассматриваемом сечении твердого тела (рис. 1.11). Перевод сечения из положения 1 в положение 2 можно рассматривать как суперпозицию двух движений: поступательного из 1 в 1′ и вращательного из 1′ в 2 вокруг точки A’, называемой обычно полюсом (рис. 1.11а). Существенно, что в качестве полюса можно выбрать любую точку, принадлежащую сечению или даже лежащую в плоскости сечение вне его. На рис. 1.11б, к примеру, в качестве полюса выбрана точка В. Обратите внимание: длина пути при поступательном перемещении изменилась (в данном случае увеличилась), но угол поворота остался прежним!
Приближая конечное положение тела к начальному (сокращая рассматриваемый промежуток времени), приходим к выводу: плоское движение твердого тела в любой момент времени можно представить как суперпозицию поступательного движения со скоростью некоторой точки, выбранной в качестве полюса, и вращения вокруг оси, проходящей через полюс. В реальной ситуации оба эти движения, естественно, происходят одновременно. Существенно, что разложение на поступательное и вращательное движения оказывается неоднозначным, причем в зависимости от выбора полюса скорость поступательного движения будет изменяться, а угловая скорость вращения останется неизменной.
7.Преобразование скорости и ускорения при переходе к другой системе отсчета.
Преобразова́ния Галиле́я — в классической механике (механике Ньютона) преобразования координат и времени при переходе от одной инерциальной системы отсчета (ИСО) к другой [1] . Термин был предложен Филиппом Франком в 1909 году. [2] Преобразования Галилея подразумевают одинаковость времени во всех системах отсчета («абсолютное время» [3] ) и выполнение принципа относительности (принцип относительности Галилея (см. ниже)).
Преобразования Галилея являются предельным (частным) случаем преобразований Лоренца для скоростей, малых по сравнению со скоростью света в пустоте. Для скоростей вплоть до порядка скоростей движения планет в Солнечной системе (и даже бо́льших), преобразования Галилея приближенно верны с очень большой точностью.
Вид преобразований при коллинеарных осях [4]
Если ИСО S движется относительно ИСО S’ с постоянной скоростью  вдоль оси
вдоль оси  , а начала координат совпадают в начальный момент времени в обеих системах, то преобразования Галилея имеют вид:
, а начала координат совпадают в начальный момент времени в обеих системах, то преобразования Галилея имеют вид:




или, используя векторные обозначения,

(последняя формула остается верной для любого направления осей координат).
Как видим, это просто формулы для сдвига начала координат, линейно зависящего от времени (подразумеваемого одинаковым для всех систем отсчета).
Из этих преобразований следуют соотношения между скоростями движения точки и её ускорениями в обеих системах отсчета:


Преобразования Галилея являются предельным (частным) случаем преобразований Лоренца для малых скоростей  (много меньше скорости света).
(много меньше скорости света).
[править] Формула преобразования скоростей
Достаточно продифференцировать  в формуле преобразований Галилея, приведенной выше, и сразу же получится приведенная в том же параграфе рядом формула преобразования скорости.
в формуле преобразований Галилея, приведенной выше, и сразу же получится приведенная в том же параграфе рядом формула преобразования скорости.
Приведем более элементарный, но и более общий вывод — для случая произвольного движения начала отсчета одной системы относительно другой (при отсутствии вращения). Для такого более общего случая, можно получить формулу преобразования скоростей, например, так.
Рассмотрим преобразование произвольного сдвига начала отсчета на вектор  ,
,
где радиус-вектор какого-то тела A в системе отсчета K обозначим за , а в системе отсчета K’ — за  ,
,
подразумевая, как всегда в классической механике, что время t в обеих системах отсчета одно и то же, а все радиус-векторы зависят от этого времени:  .
.
Тогда в любой момент времени

и в частности, учитывая
 ,
,


 — средняя скорость тела A относительно системы K;
— средняя скорость тела A относительно системы K;
 — средняя скорость тела А относительно системы K’ ;
— средняя скорость тела А относительно системы K’ ;
 — средняя скорость системы K’ относительно системы K.
— средняя скорость системы K’ относительно системы K.
Если  то средние скорости совпадают с мгновенными:
то средние скорости совпадают с мгновенными:


— как для средних, так и для мгновенных скоростей (формула сложения скоростей).
Таким образом, скорость тела относительно неподвижной системы координат равна векторной сумме скорости тела относительно движущейся системы координат и скорости системы отсчета относительно неподвижной системы отсчета. Аналогично можно получить формулу преобразования ускорений при переходе из одной системы координат в другую, верную при условии, что эти системы движутся поступательно друг относительно друга:
Качение колеса как суперпозиция поступательного и вращательного движений
![]()
§ 83. Качение без проскальзывания
Итак, у нас есть два типа простейшего движения – поступательное и вращательное. До сих пор мы рассматривали их только по отдельности, но теперь я собираюсь познакомить вас с достаточно большим классом задач, где эти движения тесным образом связаны друг с другом.
Вообразите себе автомобильное колесо, движущееся по сухой асфальтированной дороге.

Что интересно, если взять какой-то произвольный момент времени, окажется, что точка, находящаяся в самом низу колеса, покоится. Ее скорость будет равна нулю.

Если у этой точки будет какая-либо скорость, это означает, что колесо будет проскальзывать и не сможет катиться вперед. Но если сцепление с дорогой будет хорошее, точки, находящиеся на кромке колеса, будут поочередно сменять друг друга, тем самым обеспечивая дальнейшее продвижение объекта.
В физике ситуацию, когда тело, вращаясь, обеспечивает свое движение вперед, называют качением без проскальзывания. Именно для такого случая и существует связь между вращательным и поступательным движением.
В чем же заключается эта связь? Давайте представим, что, прежде чем заставить колесо катиться, мы одну из половин испачкали краской, которая при движении частично будет оставаться на дороге.

Допустим, мы позволили колесу пройти расстояние d , соответствующее дуге l (длине его “загрязненной” стороны).

Это расстояние d также показывает, насколько сместился центр масс.

Таким образом, путь который проделает середина колеса совпадает с длиной дуги l :
Эту самую дугу мы можем заменить произведением модуля углового перемещения и радиуса колеса (если возникли вопросы, смотрите § 72):
Мы можем разделить обе части этого уравнения на время движения. Равенство сохранится:
С левой стороны у нас получилась скорость, с которой перемещался центр масс, а с правой – произведение угловой скорости колеса и его радиуса:
Вы можете сказать: «Мы ведь и раньше знали об этой формуле. К чему весь этот сложный ход рассуждений?»
Раньше мы имели дело с формулой, которая связывала линейную скорость какой-либо точки, вращающейся вокруг некоторой оси, с ее угловой скоростью. А сейчас мы получили выражение, связывающее угловую скорость вращающегося объекта с линейной скоростью его центра масс.
Эта формула работает только в том случае, когда тело катится по какой-либо поверхности. Мы рассмотрим с вами задачу на применение этого уравнения в следующем параграфе.
Плоскопараллельное движение.
Движение твердого тела называется плоскопараллельным, если траектории движения всех его точек являются плоскими кривыми, лежащими в параллельных плоскостях.
Плоскопараллельное движение твердого тела можно представить как суперпозицию поступательного движения и вращения вокруг оси, направление которой не изменяется. Наглядными примерами такого движения являются качение колеса, движение книги без отрыва от стола
и т. д.
Для описания положения абсолютно твердого тела при плоскопараллельном движении необходимо задать две декартовые координаты какой-либо точки тела 1 и угол его поворота, то есть плоскопараллельное движение обладает тремя степенями свободы (рис. 86).
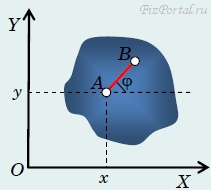
Выберем внутри тела две точки − А и В; зададим координаты хА, уА точки А и угол φ, который образует отрезок АВ с направлением оси X. Три числа − хА, уА и φ однозначно определяют положение тела на плоскости, следовательно, являются его координатами. Зная эти координаты, можно определить положение в пространстве любой другой точки твердого тела путем геометрических построений.
Покажем теперь, как можно найти скорость любой точки твердого тела при плоскопараллельном движении (рис. 87).
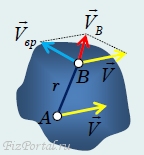
Разложим движение на две составляющие − поступательное движение, скорость которого обозначим V, и вращение вокруг оси, проходящей через точку А с угловой скоростью ω = Δφ/Δt. Тогда скорость любой другой точки тела (например, В) является векторной суммой скоростей поступательного и вращательного движении:
причем вектор скорости вращательного движения направлен перпендикулярно отрезку AB и равен по абсолютной величине: V = ωr, где r расстояние от точки В до оси вращения.
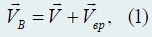
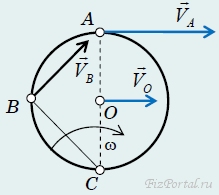
Рассмотрим катящееся без проскальзывания колесо радиуса R
(рис. 88).
Пусть его центр движется со скоростью V. Найдем скорости некоторых других точек колеса. Для этого представим движение колеса как сумму поступательного движения его центра и вращения вокруг его оси. Так как движение происходит без проскальзывания, то угловая скорость вращения определяется формулой ω = V/R. Для точек, находящихся на ободе колеса, линейная скорость вращательного движения равна по модулю скорости поступательного движения, так как для них расстояние до оси вращения равно радиусу колеса. Поэтому
Vвр = ωr = VR/R = V.
Однако направление этой скорости вращательного движения горизонтально, также как и скорости поступательного движения. Поэтому суммарная скорость точки А равна 2V и направлена горизонтально. Скорость вращательного движения точки В направлена вертикально вверх, поэтому ее полная скорость направлена под углом 45° к горизонту, а ее модуль VB = V√ Очень интересна точка касания с поверхностью С: скорость ее вращательного движения направлена горизонтально в сторону, противоположную скорости поступательного движения, поэтому ее полная скорость равна нулю. Так как разложение движения на составляющие не является однозначным, можно теперь представить качение колеса как сумму движения точки С и вращения вокруг оси, проходящей через эту точку. Мы показали, что скорость точки С равна нулю, поэтому появляется возможность рассматривать движение колеса как чистый поворот вокруг точки С. Правда, это возможно в течение только бесконечно малого промежутка времени, потому что в следующий момент точкой касания будет другая точка колеса. Множество точек твердого тела, скорости которых в данный момент равны нулю, образуют мгновенную ось вращения тела. Такая ось существует при любом движении твердого тела. Правда, положение этой оси постоянно изменяется, поэтому для вычисления координат точек такое представление движения не дает особых преимуществ. Но для вычисления скоростей точек рассматривать плоскопараллельное движение как чистый поворот очень удобно.
Легко доказать, что угол поворота тела не зависит от того, относительно какой оси мы его рассматриваем, следовательно, и угловая скорость не зависит от оси. С этой точки зрения скорость любой точки колеса определяется формулой V = ωr / , где r / − расстояние от данной точки до мгновенной оси вращения.
Рассмотренная задача об определении скоростей точек катящегося колеса может быть легко решена, если рассматривать его движение как поворот вокруг точки С (рис. 89):
точка A находится на расстоянии 2R от мгновенной оси вращения, поэтому ее скорость равна: VA = 2Rω = 2V; точка B находится на расстоянии R√ от оси, ее скорость − V√ . Направления векторов скоростей также совпадают с полученными ранее.
Таким образом, мы имеем два примерно одинаковых по сложности способа описания движения твердого тела: первый − суперпозиция поступательного и вращательного движений; второй − поворот вокруг мгновенной оси.
Дополнение. Если бы скорость света была поменьше! Все взаимодействия, все сигналы распространяются с конечной скоростью, поэтому любая информация, воспринимаемая нашими органами чувств и приборами, «запаздывает»: то, что мы видим «сейчас», на самом деле произошло «раньше». Нам повезло − скорость света настолько велика, что упомянутое «запаздывание» практически не оказывает никакого влияния на наше поведение. Тем не менее в некоторых случаях его необходимо учитывать.
1 С точки зрения кинематического описания, выбор этой точки произволен. Только следует стремиться к тому, чтобы траектория этой точки была проще. Далее мы укажем, как можно легко найти такую точку.