Коэффициент мощности асинхронного двигателя — от чего зависит и как изменяется
 На шильдике (информационной табличке) любого асинхронного двигателя, кроме других рабочих параметров, указан такой его параметр как косинус фи — Cosфи. Косинус фи иначе называется коэффициентом мощности асинхронного двигателя.
На шильдике (информационной табличке) любого асинхронного двигателя, кроме других рабочих параметров, указан такой его параметр как косинус фи — Cosфи. Косинус фи иначе называется коэффициентом мощности асинхронного двигателя.
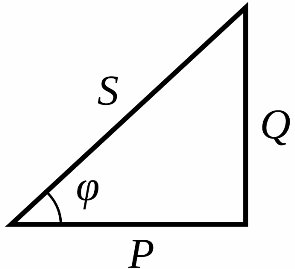
Почему этот параметр называется косинусом фи, и какое отношение он имеет к мощности? Все довольно просто: фи — это разность фаз между током и напряжением, и если изобразить графически активную, реактивную и полную мощности, имеющие место при работе асинхронного двигателя (трансформатора, индукционной печи и т. д.), то окажется, что отношение активной мощности к полной мощности — это и есть косинус фи — Cosфи, или другими словами — коэффициент мощности.
При номинальном напряжении питания и при номинальной нагрузке на валу асинхронного двигателя, косинус фи или коэффициент мощности как раз и будет равен тому значению, которое указано на его шильдике.

Например, для двигателя АИР71А2У2 коэффициент мощности будет равен 0,8 при нагрузке на валу 0,75 кВт. Но КПД этого двигателя равен 79%, следовательно потребляемая двигателем активная мощность при номинальной нагрузке на валу окажется больше 0,75 кВт, а именно 0,75/КПД = 0,75/0,79 = 0,95 кВт.
Тем не менее, при номинальной нагрузке на валу, параметр коэффициент мощности или Cosфи связан именно с потребляемой из сети энергией. Значит полная мощность данного двигателя окажется равна S = 0,95/Cosфи = 1,187 (КВА). Где P = 0,95 – потребляемая двигателем активная мощность.
При этом коэффициент мощности или Cosфи связан с нагрузкой на валу двигателя, поскольку при разной механической мощности на валу — разной будет и активная составляющая тока статора. Так, в режиме холостого хода, то есть когда к валу ничего не присоединено, коэффициент мощности двигателя не превысит, как правило, значения 0,2.
Если же нагрузку на валу начать увеличивать, то активная составляющая тока статора также будет расти, следовательно коэффициент мощности возрастет, и при близкой к номиналу нагрузке окажется равным примерно 0,8 — 0,9.
Если теперь нагрузку продолжить увеличивать, то есть нагружать вал сверх номинала, то ротор будет тормозиться, возрастет величина скольжения s, индуктивное сопротивление ротора станет вносить свой вклад, и коэффициент мощности начнет уменьшаться.
Если двигатель определенную часть рабочего времени работает вхолостую, то можно прибегнуть к снижению подводимого напряжения, например переключением с треугольника на звезду, тогда фазное напряжение на обмотках уменьшится в корень из 3 раз, снизится индуктивная составляющая от крутящегося вхолостую ротора, а активная составляющая в обмотках статора немного возрастет. Коэффициент мощности таким образом немного повысится.

Вообще, системы, питающиеся переменным током, такие как асинхронные двигатели, всегда обладают кроме активной еще и индуктивной и емкостной составляющими, поэтому каждые пол периода в сеть возвращается какая-то определенная часть энергии, называемая реактивной мощностью Q.
Этот факт вызывает у поставщиков электроэнергии проблемы: генератор вынужден поставлять в сеть полную мощность S, которая к генератору возвращается, но провода то все равно требуются соответствующего сечения под эту полную мощность, и, конечно, возникает паразитный нагрев проводов от циркулирующего туда-сюда реактивного тока. Получается, что генератор обязан поставлять полную мощность, часть которой в принципе является бесполезной.
В чисто активной форме генератор электростанции мог бы поставить потребителю гораздо больше электроэнергии, а для этого необходимо, чтобы коэффициент мощности был бы близок к единице, то есть как при чисто активной нагрузке, у которой Cosфи = 1.
Для обеспечения таких условий некоторые крупные предприятия устанавливают у себя на территории установки компенсации реактивной мощности, то есть системы из катушек и конденсаторов, которые автоматически подключаются параллельно асинхронным двигателям когда коэффициент их мощности снижается.
Получается, что реактивная энергия циркулирует между асинхронным двигателем и данной установкой, а не между асинхронным двигателем и генератором на электростанции. Так коэффициент мощности асинхронных двигателей доводят почти до 1.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
3. Коэффициент мощности и его зависимость от нагрузки ад.
Коэффициент мощности определяется соотношением cosφ1=P1/S1=P1/  , где: Р1, Q1, S1 – активная, реактивная и полная мощность двигателя.
, где: Р1, Q1, S1 – активная, реактивная и полная мощность двигателя.
Р1 = Р2 + ∆P, где: Р2 – мощность на валу (полезная мощность); ∆P – мощность потерь. ∆P = ∆Pэл + ∆Pст + ∆Pмех,
где: ∆Pэл – электрические потери (потери на нагрев обмоток); ∆Pст – потери в стали (потери на нагрев сердечника);
∆Pмех – механические потери. Электрические потери ∆Pэл зависят от токов в обмотках и возрастают при увеличении нагрузки на валу. Потери в стали не зависят от нагрузки на валу, а зависят от подведенного к обмотке статора напряжения. Механические потери относятся к постоянным потерям. В номинальном режиме cosφн = 0,75÷0,95, cosφхх = 0,08÷0,15. 
Снижение cosφхх объясняется тем, что активная мощность мала (P1хх = ∆Pэл + ∆Pст + ∆Pмех), а реактивная мощность Q1 остается такой же, как и в номинальном режиме. На рис. 2.28 показана зависимость коэффициента мощности асинхронного двигателя от нагрузки на валу. При большой недогрузке асинхронного двигателя он имеет низкий коэффициент мощности, что экономически невыгодно.
Для повышения cosφ при малой нагрузке рекомендуется понижать подведенное к двигателю напряжение. При этом уменьшается реактивная мощность, а коэффициент мощности повышается.
Билет 6. 1. Комплексное число, модуль и аргумент которого соответственно раны амплитуде и начальной фазе син. тока, называют комплексной амплитудой тока:  .
.
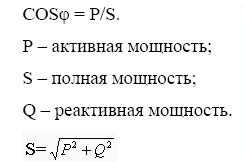
2. Внешней характеристикой трансформатора называют зависимость вторичного напряжения от тока нагрузки при постоянных значениях первичного напряжения и коэффициента мощности нагрузки: U2’= f(I2’) или U2= f(I2) при U1 = U1ном = const и cosφ2 = const.
При холостом ходе трансформатора можно считать, что U2’=U20’=U1, поэтому U’2 = U’20 — ΔU, т. е. напряжение на вторичной обмотке отличается от напряжения при холостом ходе на значение потери напряжения в трансформаторе. Для последнего уравнения имеем (%): U’2 = U2 = 100 — ΔU.
Для трансформаторов большой мощности (%): U2 = 100 — βUksinφ2. (7.20)
На рис. 7.24а представлены внешние характеристики трансформатора для нескольких значений cosφ2. В силовых трансформаторах при соsφ2 = 1 будет sinφ2 = 0, и напряжение U2 остается неизменным при всех значениях нагрузки. При активно-индуктивной нагрузке φ2 положителен, и чем он больше, тем больше потери напряжения и тем значительнее снижение напряжения U2 с ростом тока нагрузки. При активно-емкостной нагрузке φ2 отрицателен и потеря напряжения ΔU= — βUksinφ2 также отрицательна. Уравнение (7.20) принимает вид U2 = 100 + βUksinφ2 , откуда следует, что с ростом β, т. е. с ростом тока нагрузки, напряжение U2 увеличивается по сравнению с U20. Для трансформаторов малой мощности нельзя пренебрегать активной составляющей напряжения короткого замыкания. В этом случае для определения потери напряжения нужно пользоваться уравнением, в котором все члены выражены в процентах:U2 = 100 — β(Uкаcosφ2 + Uкрsinφ2).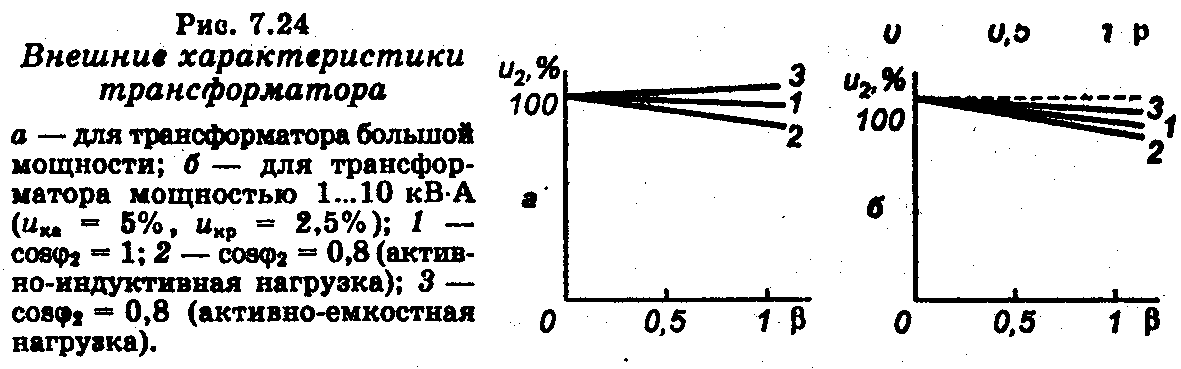
Наличие составляющей Uка обусловливает снижение напряжения U2 при активной нагрузке (соsφ2 = 1) и уменьшение отклонения напряжения от номинального значения при наличии реактивной составляющей тока нагрузки (как индуктивной, так и емкостной). Внешние характеристики трансформаторов являются практически прямыми линиями. Снижение напряжения при номинальной нагрузке в очень большой степени зависит от коэффициента мощности нагрузки и напряжения короткого замыкания, но не может превышать значения Uк.
Схемы соединения обмоток трехфазного тр-ра.Первичные и вторичные обмотки трехфазных трансформаторов (групповых и трехстержневых) соединяют звездой или треугольником. В некоторых случаях обмотки трансформаторов соединяют по схеме «зигзаг». При соединении обмоток звездой с выводом нейтральной точки это соединение обозначают знаком Y-. Схемы соединения первичной и вторичной обмоток двухобмоточного трансформатора обозначают дробью, в числителе которой указывают схему соединения первичной обмотки, а в знаменателе — схему соединения вторичной обмотки, например Y/Y-, Δ/Δ, Y-/Δ. Схемы соединения обмоток трехобмоточных трансформаторов обозначают следующим образом: Y/Y/Δ. Обмотку высшего напряжения трансформатора с экономической точки зрения выгоднее соединять звездой, так как для получения заданного линейного напряжения Uл требуется фазное напряжение Uф =Uл /  , и следовательно, меньшее число витков обмотки и меньший расход изоляционных материалов. Обмотка, соединенная треугольником, также имеет свои преимущества. Ток холостого хода несинусоидален. При соединении обмоток звездой без нейтрального провода гармоники третьего порядка, совпадающие по фазе во всех фазных токах холостого хода, отсутствуют. Это приводит к искажению магнитных потоков и возникновению гармоник ЭДС третьего порядка. Напряжение вторичной обмотки становится несинусоидальным. При наличии обмотки, соединенной треугольником, под действием ЭДС третьего порядка в замкнутом треугольнике обмоток появится ток и падение напряжения в обмотках уравновесит ЭДС третьей гармоники. Линейные напряжения обмотки, соединенной треугольником, будут синусоидальными. Поэтому у трансформаторов большой мощности одну из обмоток обычно соединяют треугольником. Схемы соединения обмоток трансформатора на электрических схемах показаны на рис. 7.28. Начала и концы первичных обмоток фаз обозначают прописными буквами (А, В, С и X, У, Z), а начала и концы вторичных обмоток фаз — строчными (а, b, с и х, у, z).
, и следовательно, меньшее число витков обмотки и меньший расход изоляционных материалов. Обмотка, соединенная треугольником, также имеет свои преимущества. Ток холостого хода несинусоидален. При соединении обмоток звездой без нейтрального провода гармоники третьего порядка, совпадающие по фазе во всех фазных токах холостого хода, отсутствуют. Это приводит к искажению магнитных потоков и возникновению гармоник ЭДС третьего порядка. Напряжение вторичной обмотки становится несинусоидальным. При наличии обмотки, соединенной треугольником, под действием ЭДС третьего порядка в замкнутом треугольнике обмоток появится ток и падение напряжения в обмотках уравновесит ЭДС третьей гармоники. Линейные напряжения обмотки, соединенной треугольником, будут синусоидальными. Поэтому у трансформаторов большой мощности одну из обмоток обычно соединяют треугольником. Схемы соединения обмоток трансформатора на электрических схемах показаны на рис. 7.28. Начала и концы первичных обмоток фаз обозначают прописными буквами (А, В, С и X, У, Z), а начала и концы вторичных обмоток фаз — строчными (а, b, с и х, у, z).
Параллельная работа тр-ров. При некоторых условиях может оказаться, что для питания электроприемникоз мощности одного трансформатора недостаточно, тогда применяют два или более параллельно включенных трансформатора. Такое положение создается, если суммарная мощность приемников, подключенных к вторичной обмотке трансформатора, больше мощности трансформатора или если для питания приемников требуется большая надежность, не обеспечиваемая одним трансформатором. В больших энергосистемах по линиям передачи высокого напряжения передается электроэнергия, мощность которой чаще всего превышает мощность одного трансформатора, и на такую линию работают несколько трансформаторов.
В подобных случаях трансформаторы включают параллельно (рис. 7.31). При параллельной работе к первичным обмоткам всех трансформаторов (двух или более) подводят одно и то же напряжение U±. Вторичные обмотки всех трансформаторов подключают к одним и тем чсе общим шинам, к которым и подключают нагрузку. Для нормальной работы в режиме параллельного соединения трансформаторы должны удовлетворять следующим условиям:
1) коэффициенты трансформации всех трансформаторов должны быть равны, т. е. k1 = k2 = k3 = . = kn;
2) напряжения короткого замыкания всех трансформаторов должны быть равны, т. е. uk1=uk2=uk3=…=ukn ;
3) трехфазные трансформаторы должны иметь одинаковую группу соединения обмоток.

Так как первичные обмотки трансформаторов подключены к одному источнику с напряжением U1, то при холостом ходе для равенства вторичных напряжений всех трансформаторов необходимо, чтобы были равны их вторичные ЭДС. Это имеет место только при равенстве коэффициентов трансформации. Если у трансформатора Т1 (рис. 7.31а) коэффициент трансформации больше, чем у трансформатора Т2, то E21 > Е22. В замкнутом контуре вторичных обмоток трансформаторов под действием ЭДС ΔЕ2 = E21 — Е22 ≠ 0 возникнет уравнительный ток I2y, который будет трансформироваться в первичные обмотки. Значение этого тока зависит также от сопротивления обмоток трансформаторов, а фаза тока — от составляющих полных сопротивлений трансформаторов (рис. 7.32). Уравнительный ток в обмотках не является током нагрузки, он нагревает обмотки и
снижает полезную мощность трансформатора. Считается допустимым для практики отклонение значения коэффициентов трансформации друг от друга на 0,5%.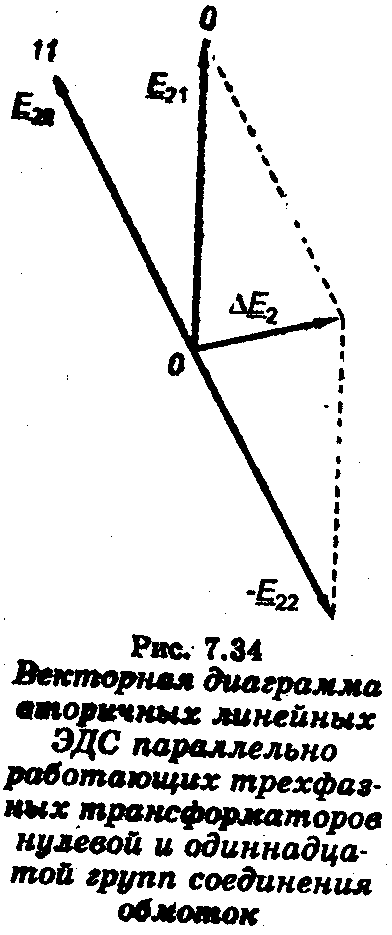
В режиме нагрузки вторичное напряжение U2 каждого трансформатора зависит от его внешней характеристики (рис. 7.33). При этом отклонение напряжения U2 от напряжения холостого хода U20. равного для всех параллельно работающих трансформаторов, пропорционально напряжению короткого замыкания Uк трансформатора. Если трансформаторы имеют разные напряжения Uк, то наклон их внешних характеристик будет разный. На рис. 7.33 представлены внешние характеристики трансформаторов, у которых Uк2 > Uk1.
Так как вторичные обмотки обоих трансформаторов подключают к общим шинам, то напряжения на их вторичных обмотках будут всегда одинаковы и равны напряжению на шинах U2ш. При некоторой нагрузке напряжение U2ш будет иметь значение, соответствующее штриховой линии на рис. 7.33, точки пересечения которой с внешними характеристиками трансформаторов являются рабочими точками для данного режима. Абсциссы этих точек определяют ток нагрузки каждого трансформатора, причем I22 < I21.
Таким образом, трансформаторы с разными Uк загружаются по-разному: трансформатор с меньшим ик загружается большим током, чем трансформатор с большим Uк. При увеличении мощности приемников увеличивается нагрузка на оба трансформатора. Однако когда нагрузка трансформатора Т1 достигнет номинального значения, нагрузка трансформатора Т2 будет еще далека от номинальной. Полностью мощность трансформатора Т2 не может быть использована, так как трансформатор Т1 окажется перегруженным. Поэтому включаемые на параллельную работу трансформаторы должны иметь равные значения Uк. Допускается отклонение от среднеарифметического значения не более чем на ±10%.Третье условие является абсолютно жестким. Если трансформаторы принадлежат к разным группам соединения обмоток, то между векторами линейных вторичных ЭДС (следовательно, и напряжений) сдвиг фаз будет отличаться от 0°, а их векторная разность не будет равна нулю. На рис. 7.34 показана векторная диаграмма линейных вторичных ЭДС трансформаторов, принадлежащих к нулевой и одиннадцатой группам соединения обмоток. Возникающая ЭДС ΔE2=E21 – E22 настолько велика, что создаваемый ею уравнительный ток превышает номинальный ток в несколько раз и режим оказывается аварийным.
3. Зависимость электромагнитного момента от скольжения: M=3I2 2 R2/(SΩ1), где М – эл/маг. момент, I2 – ток ротора, S – скольжение, Ω1 – угловая скорость вращения поля.
Зависимость тока ротора от S: Под действием ЭДС ротора E2S, индуцируемой вращающимся магнитным полем, в замкнутой обмотке ротора возникает ток I2, определяемый по закону Ома:  (12.12)
(12.12)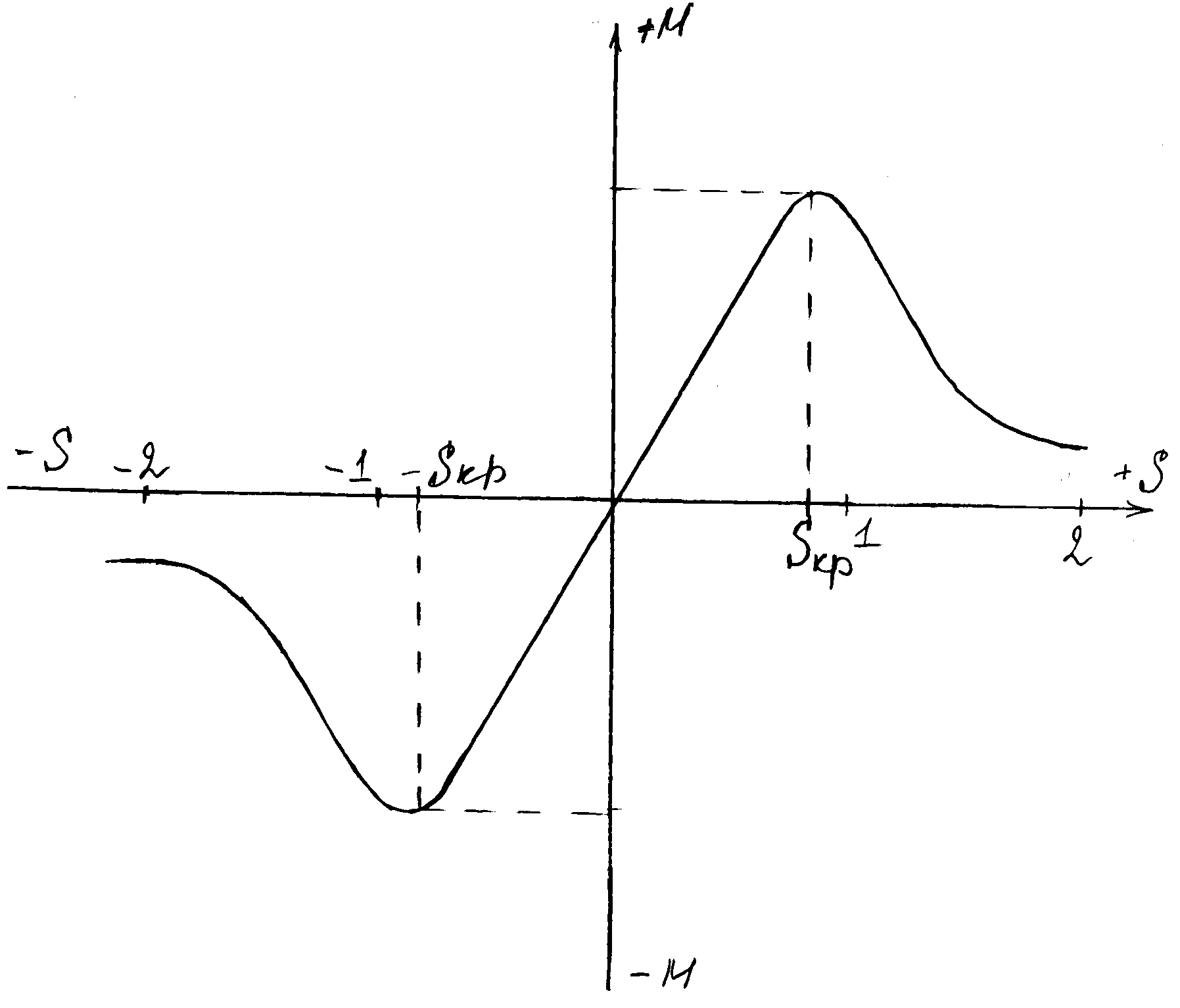
где R2 — активное сопротивление фазы ротора; Z2S — полное сопротивление фазы ротора.
Ток I2 в обмотке ротора имеет такую же частоту f2=sf, как и ЭДС Е2S. Так как полное сопротивление фазы ротора имеет индуктивную составляющую Х2S, то ток I2 отстает по фазе от Е2S на угол ψ2=arctg(X2S/R2) (12.13).
Так как Е2S = sЕ2 и Х2S = sХ2, получаем:  , или, разделив на s:
, или, разделив на s:  .
.
При критическом скольжении момент машины достигаем максимального значения:  . Скольжение, при котором момент равен максимальному, можно найти, взяв производную от M и S и приравняв их: Sкр= ±(R2/X20).
. Скольжение, при котором момент равен максимальному, можно найти, взяв производную от M и S и приравняв их: Sкр= ±(R2/X20).
Из графиков и формул видно, что:
1)АМ может работать и в двигательном, и в генераторном режимах, в зависимости от скольжения;
2) АМ работает устойчиво при значениях скольжения
3) численное значение Sкр в основном определяется параметрами ротора, изменяя R2 можем увеличить или уменьшить Sкр.
Вопрос 1. Резонанс в контуре достигается при угловой частоте W0=1/(LC), следовательно при подключении к клеммам конденсатора сопротивления R, частота изменяться не будет.
Как изменяется коэффициент мощности асинхронного двигателя при уменьшении его нагрузки

§ 4.22. РАБОТА АСИНХРОННОГО ДВИГАТЕЛЯ ПРИ НЕНОМИНАЛЬНЫХ УСЛОВИЯХ
Изменение частоты. При питании асинхронного двигателя от автономного источника электроэнергии небольшой мощности (транспортные установки, передвижные электростанции) частота и напряжение сети, к которой подключают двигатель, могут отличаться от номинальных. Рассмотрим влияние изменения частоты на работу двигателя при условии, чтонапряжение U 1 = U ном = const.
Если принять U 1 ≈ Е l , то согласно (4.2)
Ф m = U 1 /(4,44f 1 w 1 k o61 ).
Из (4.29) имеем, что
I 2 = М/(с м Ф т cos ψ2).
Следовательно, изменение частоты f 1 приводит к изменению потока Ф т и соответствующему изменению тока ротора I 2 и нагрузочной составляющей I’ 2 тока статора. При уменьшении частоты магнитный поток и ток холостого хода I 0 увеличиваются, причем ток I 0 из-за насыщения стали магнитопровода возрастает быстрее, чем магнитный поток. Обычно уменьшение частоты f 1 на 10 % вызывает увеличение тока I 0 на 20—30%. Поскольку ток I 0 является практически реактивным, это приводит к снижению коэффициента мощности двигателя.
При увеличении частоты f 1 пропорционально возрастает частота вращения п 2 . Если нагрузка двигателя имеет «вентиляторную» характеристику, то нагрузочный момент возрастает пропорционально квадрату или кубу частоты вращения, т. е. частоты f 1 . Кроме того, магнитный поток Фт уменьшается обратно пропорционально изменению частоты. Все это, согласно (4.106), приводит к резкому увеличению тока I 2 . При возрастании частоты на 10% ток ротора двигателя, вращающего вентилятор, увеличивается примерно в 1,5 раза, что может привести к перегреву двигателя.
При неизменном нагрузочном моменте увеличение частоты повышает опасность нарушения устойчивости двигателя, так как снижается максимальный момент двигателя пропорционально f 1 2 . Таким образом, отклонение частоты f 1 от номинального значения приводит к ухудшению условий работы двигателей и поэтому частота не должна отличаться (согласно ГОСТу) от номинальной более чем на 5%.
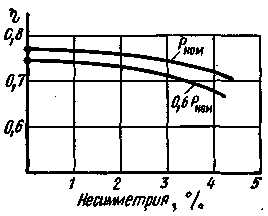
Изменение напряжения. Обычно асинхронные двигатели рассчитывают так, чтобы при номинальном режиме они имели КПД и cos φ 1 , близкие к максимальным. Кроме того, максимум КПД достигается, когда постоянные потери — механические и в стали равны переменным потерям в обмотках (см. § 4.9). Поэтому влияние изменения напряжения является неоднозначным и зависит от нагрузки на валу двигателя.
При увеличении напряжения возрастает магнитный поток и, следовательно, увеличиваются ток холостого хода и магнитные потери в стали магнитопровода. Вследствие этого КПД и cos φ 1 двигателя уменьшаются. Уменьшение напряжения опасно тем, что пропорционально квадрату напряжения изменяется максимальный вращающий момент двигателя и при большом моменте нагрузки может произойти нарушение устойчивости двигателя.
Однако при частичной нагрузке, когда нет угрозы нарушения устойчивости, уменьшение напряжения может оказаться благоприятным, так как пропорционально напряжению уменьшаются магнитный поток Ф m , ток холостого хода и магнитные потери в стали магнитопровода, вследствие чего КПД и cos φ 1 могут возрасти.
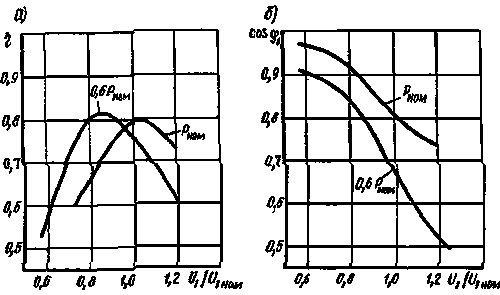 |
Рис. 4.72. Зависимости КПД и cos φ 1 асинхронного двигателя от питающего напряжения |
На рис. 4.72, а показаны кривые зависимости КПД от напряжения сети для двух значений мощности двигателя Р = Р ном и 0,6Р ном . Каждой нагрузке соответствует оптимальное напряжение, при котором постоянные потери равны переменным. Чем меньше нагрузка, тем меньше оптимальное значение напряжения. Коэффициент мощности двигателя при нагрузках, меньших номинальной, также может возрастать с уменьшением напряжения и для каждой нагрузки существует напряжение, при котором коэффициент мощности имеет максимум (рис. 4.72,б). Таким образом, желательно при частичных нагрузках снижать напряжение питания, для того чтобы КПД и cos φ 1 поддерживались на высоком уровне.
Рис. 4.73. Круговые диаграммы асинхронного двигателя при номинальном и пониженном напряжении
На рис. 4.73 показаны круговые диаграммы двигателя при номинальных напряжении и нагрузке (а) и при пониженном напряжении и частичной нагрузке (б). При понижении напряжения уменьшается ток холостого хода и диаметр окружности токов. В обоих случаях значение cos φ 1 близко к максимальному, так как вектор тока Í 1 расположен по касательной к окружности токов. Если двигатель длительное время работает с нагрузками менее 0,5Р ном , то обычно бывает выгодным иметь устройство, регулирующее напряжение (например, трансформатор с регулированием под нагрузкой). В простейшем случае можно изменять фазное напряжение двигателя, переключая его обмотки с соединения Δ (при номинальной нагрузке) на Y (при малой нагрузке).
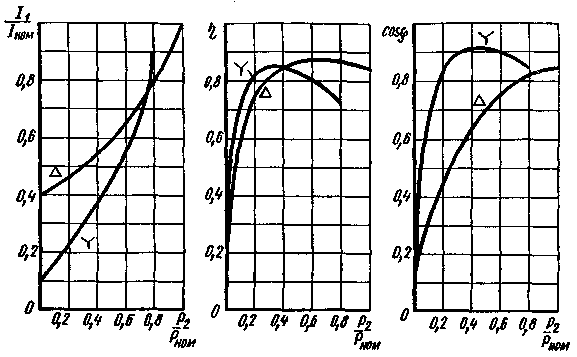
Рис. 4.74. Рабочие характеристики асинхронного двигателя при соединении обмотки статора по схемам Y и Δ
На рис. 4.74 показаны кривые относительных значений I 1 , η и cos φ 1 для двигателя мощностью 28 кВт при таком переключении. Недостатком такого метода является ступенчатое изменение напряжения. Следует иметь в виду, что при включении обмоток двигателя по схеме Y его максимальный момент, пропорциональный квадрату напряжения, уменьшается в три раза. Следовательно, такое переключение можно производить, если нагрузка двигателя равна или меньше 30% от номинальной.
Несимметрия напряжения. Несимметричную систему трехфазных напряжений можно разложить на симметричные составляющие прямой, обратной и нулевой последовательности (см. гл. 2) и проанализировать влияние каждой из них на работу двигателя. ГОСТ допускает несимметрию напряжения (отношение напряжения обратной последовательности к номинальному напряжению) до 2%.
Рис. 4.75. Зависимости моментов асинхронного двигателя от скольжения
Система напряжений обратной последовательности создает магнитное поле, вращающееся в противоположную относительно ротора сторону с частотой вращения n обр = 60f 1 р = |n 1 |.
Вследствие этого скольжение ротора относительно обратного поля s обр = (n 1 — n 2 )/n 1 = [n 1 + n 1 (1 — s)]/n 1 ≈ 2, так как скольжение асинхронного двигателя в установившемся режиме s ≈ (0,01 ÷ 0,05). Следовательно, обратное поле создает тормозящий момент М обр , а токи обратной последовательности создают дополнительные потери, увеличивающие нагревание обмоток и снижающие КПД.
На рис. 4.75 показана зависимость моментов асинхронного двигателя от скольжения. Из нее следует, что под влиянием токов обратной последовательности результирующий момент двигателя М рез снижается и скольжение при том же нагрузочном моменте М н на валу возрастает.
 |
| Рис. 4.76. Зависимость КПД двигателя от несимметрии питающего напряжения |
На рис. 4.76 показаны зависимости КПД от асимметрии напряжения для одного из двигателей общего применения мощностью 5,5 кВт. При несимметрии напряжения 2% КПД снижается примерно на 2%, а при 4% почти на 5,5%. Следовательно, несимметрия питающего напряжения крайне нежелательна.
Обрыв фазы обмотки статора. При пуске трехфазного асинхронного двигателя с оборванной фазой создаются такие условия, как и в однофазном двигателе (см. § 4.17), т. е. его результирующий момент М рез = М пр — М обр = 0. Если ротор двигателя в момент обрыва находится во вращении, то М пр > М о6р и при М рез > М н двигатель продолжает вращаться, однако максимальный момент М max оказывается существенно меньшим, чем при неповрежденной фазе. При переходе двигателя в однофазный режим частота вращения практически
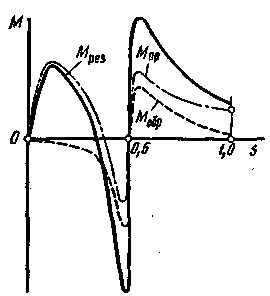 |
| Рис. 4.77. Зависимости моментов асинхронного двигателя от скольжения при обрыве фазы обмотки ротора |
не изменяется, поэтому мощность на валу также остается приблизительно одинаковой. Но отношение токов в этих режимах I 1 /I 3 = (3η 3 cos φ 3 )/(2η 1 cos φ 1 ), где индекс 1 относится к однофазному режиму, а 3 — к трехфазному. Поэтому при условии η 1 = η 3 и cos φ 1 = cos φ 3 ток I 1 в однофазном режиме в 1,5 раза больше, чем в трехфазном. В действительности КПД и cos φ в однофазном режиме уменьшаются по сравнению с трехфазным, вследствие чего ток I 1 возрастает в еще большей степени. Если двигатель работает при нагрузке, близкой к номинальной, то при обрыве фазы его ток становится значительно больше номинального и двигатель быстро перегревается и «выходит из строя».
Обрыв фазы обмотки ротора. При несимметрии сопротивлений фаз ротора возникает эффект одноосного демпфирования, подробно рассмотренный в § 6.14. В результате этого кривая момента двигателя в области s = 0,5 имеет провал. Значение этого провала может оказаться настолько большим, что двигатель при пуске под нагрузкой не достигает номинальной частоты вращения и «застревает» при n 2 ≈ 0,5п 1 . При обрыве одной из фаз ротора электромагнитный момент в области s = 0,5 отрицательный (рис. 4.77), вследствие чего двигатель не разгоняется до номинальной частоты вращения даже при пуске без нагрузки.
Коэффициент мощности асинхронного двигателя и его зависимость от нагрузки на валу
где: Р1, Q1, S1 – активная, реактивная и полная мощность двигателя.
где: Р2 – мощность на валу (полезная мощность;
∆P – мощность потерь.
где: ∆Pэл – электрические потери (потери на нагрев обмоток);
∆Pст – потери в стали (потери на нагрев сердечника);
∆Pмех – механические потери.
Электрические потери ∆Pэл зависят от токов в обмотках и возрастают при увеличении нагрузки на валу. Потери в стали не зависят от нагрузки на валу, а зависят от подведенного к обмотке статора напряжения.
Механические потери относятся к постоянным потерям.
Снижение cosφхх объясняется тем, что активная мощность мала (P1хх = ∆Pэл + ∆Pст + ∆Pмех), а реактивная мощность Q1 остается такой же, как и в номинальном режиме.
На рис. 2.28 показана зависимость коэффициента мощности асинхронного двигателя от нагрузки на валу.
При большой недогрузке асинхронного двигателя он имеет низкий коэффициент мощности, что экономически невыгодно.
Для повышения cosφ при малой нагрузке рекомендуется понижать подведенное к двигателю напряжение. При этом уменьшается реактивная мощность, а коэффициент мощности повышается.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями: